




2026

Engineered ionic polymer metal composites as extension sensors: Theory and experiments Journal Article
In: ASME Letters in Dynamic Systems and Control/MECC 2025 Joint Submission, vol. 6, iss. 1, pp. 011003 (6-pages), 2026.
2025

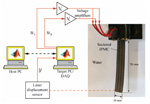
Engineered ionic polymer metal composites (eIPMCs) under dynamic compression loading conditions: theory and experiments Journal Article
In: Smart Materials and Structures, vol. 34, iss. 2, pp. 025048, 2025.
2024

Magnetically-actuated Endoluminal Soft Robot with Electroactive Polymer Actuation for Enhanced Gait Performance Journal Article
In: ASME J. Mechanisms and Robotics (In press), vol. 16, no. 10, pp. 104503, 2024.
2023

Engineered IPMC Sensors: Modeling, Characterization, and Application towards Wearable Postural-tactile Measurement Journal Article
In: Smart Materials and Structures, vol. 33, pp. 015035 (12 pages), 2023.
2022
Ionic Polymer-Metal Composite Sensors and Actuators for Wearable and Medical Devices Proceedings Article
In: 6th International Conference on Active Materials and Soft Mechatronics (AMSM 2022), October 26-29, 2022, Georgia Tech, Atlanta, Georgia, USA, 2022.

Locomotion and Steering of a Magnetic-electroactive Endoluminal Soft Robot PhD Thesis
2022.
2021
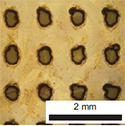
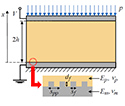
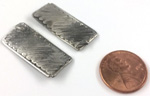
Ionic Polymer Metal Composite Compression Sensors with 3D-Structured Interfaces Journal Article
In: Smart Materials and Structures, vol. 30, no. 12, pp. 125027, 2021.
2019
Hygroscopic swelling for 4D fabrication of ionic polymer-metal composite soft-robotic devices Masters Thesis
University of Utah, 2019.
2018

3D printing, performance characterization, and machine learning control of ionic polymer-metal composite actuators with applications in soft robotics PhD Thesis
University of Utah, 2018.

In: Invited article to the Special Issue on Active Materials and Soft Mechatronics, International Journal of Smart and Nano Materials, vol. 8, no. 4, pp. 144-213, 2018.
2017

Guest Editorial: Focused Section on Advances in Soft Robotics Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 1, no. 2, pp. 121 - 123, 2017.

Guidelines for making Ionic Polymer-Metal Composite (IPMC) materials as artificial muscles by advanced manufacturing methods: State-of-the-Art, Book Chapter
In: Bar-Cohen, Yoseph (Ed.): Advances in manufacturing and processing of materials and structures (Under review), CRC Press/Taylor & Francis Group, LLC, 2017.

Fused Filament 3D Printing of Ionic Polymer-Metal Composites for Soft Robotics Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, Portland, OR, March 26-29, 2017., 2017.

3D-Printed Ionic Polymer-Metal Composite Soft Crawling Robot Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, 2017, 2017.
2016
3D Printing of Smart Materials Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.

IPMC Manufacturing Techniques: Recent Developments Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.

IPMCs as EAPs: how to start experimenting with them Book Chapter
In: Springer International Publishing AG (in press), 2016.
Precision feedback and feedforward control of ionic polymer-metal composite actuators Book Chapter
In: Shahinpoor, M. (Ed.): Chapter 11, Royal Society of Chemistry, 2016.

Characterization of 3D-printed IPMC Actuators Proceedings Article
In: SPIE Smart Structures/NDE, Las Vegas, Nevada, March 20-24, 2016, 2016.
2015
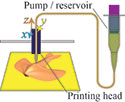
Fused filament 3D printing of ionic polymer-metal composites (IPMCs) Journal Article
In: Smart Materials and Structures, vol. 24, pp. 125021 (11 pages), 2015.

Fused Filament Additive Manufacturing of Ionic Polymer-Metal Composite Soft Active 3D Structures Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), September 21-23, 2015 in Colorado Springs, Colorado., Colorado Springs, Colorado, 2015, (Jim Carrico and Nick Traeden were winners of the 2015 SMASIS Conf. Best Student Paper Award!).

Slender tube-shaped and square rod-shaped IPMC actuators with integrated sensing for soft mechatronics Journal Article
In: Meccanica, vol. 50, no. 11, pp. 2781-2795, 2015.
2014
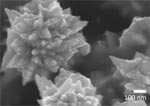
Nanothorn electrodes for ionic polymer-metal composite artificial muscles Journal Article
In: Scientific Reports, vol. 4, no. 6176, 2014.
Development of a tube-shaped ionic polymer-metal composite actuator with integrated sensing Masters Thesis
University of Nevada, Reno, 2014.
Monolithic IPMC fins for propulsion and maneuvering in bio-inspired underwater robotics Journal Article
In: IEEE Journal of Oceanic Engineering, vol. 39, no. 3, pp. 540 - 551, 2014.
2013

The effects of electrode surface morphology on the actuation performance of IPMC Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2013.
Sectored tube-shaped ionic polymer-metal composite actuator with integrated sensor Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, September 19-21, Snowbird, Utah, USA, 2013.
An IPMC-enabled bio-inspired bending/twisting fin for underwater applications Journal Article
In: Smart Mater. Struct., vol. 22, pp. 014003, 2013.

Precision Control of Ionic Polymer-Metal Composite Actuators Proceedings Article
In: 7th World Congress on Biomimetics, Artificial Muscles and Nano-Bio (BAMN2013), 2013.
2012

Physics based electromechanical model of IPMC considering various underlying currents Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2012.

Mitigating IPMC back relaxation through feedforward and feedback control of patterned electrodes Journal Article
In: Smart Mater. Struct., vol. 21, pp. 085002 (12 pages), 2012.

Introduction to the themed articles on ionic polymer-metal composites Journal Article
In: International Journal of Smart and Nano Materials, vol. 3, no. 3, pp. 183 – 187, 2012.

Introduction to part 2 of the themed articles on ionic polymer-metal composites Journal Article
In: International Journal of Smart and Nano Materials, vol. 3, no. 4, pp. 243, 2012.

Integrated sensing for IPMC actuators using strain gages for underwater applications Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 345 – 355, 2012.
2011
Design and characterization of sectored (patterned) IPMC actuators for propulsion and maneuvering in bio-inspired underwater systems Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2011.
Modeling and designing IPMCs for twisting motion: electromechanical and mechanoelectrical transduction Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2011.

Mitigating IPMC back-relaxation effect using multi-input control Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
Characterization of sectored-electrode IPMC-based propulsors for underwater locomotion Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), Scottsdale, Arizona, September 18–21, 2011, pp. 171–180, 2011.

Electrically responsive stiffness change of IPMCs Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.

A twistable ionic polymer-metal composite artificial muscle for marine applications Journal Article
In: Marine Technology Society Journal, vol. 45, no. 4, pp. 83 – 98, 2011.
A twistable artificial muscle for underwater robotic applications Proceedings Article
In: US-Korea Summit on Science and Engineering (UKC), 2011.
2010

Tracking control of oscillatory motion in IPMC actuators for underwater applications Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.

Sectored-electrode IPMC actuator for bending and twisting motion Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, pp. 764221, 2010.

IPMC: recent progress in modeling, manufacturing, and new applications Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2010.

Development of dimensionally scalable IPMC materials Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.
2009

Frequency-weighted feedforward control for dynamic compensation in ionic polymer-metal composite actuators Journal Article
In: Smart Materials and Structures, vol. 18, no. 12, pp. 125016 (11 pages), 2009.
2008
Fabrication and Integrated Feedforward and Feedback Control of Ionic Polymer-Metal Composite Actuators Masters Thesis
Virginia Commonwealth University, Richmond, Virginia, 2008.
Application of Feedforward Dynamics Compensation in Ionic-Polymer Metal Composite Actuators Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics Conference, pp. 69270F-1 – 69270F-12, 2008.
