




2022

Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy PhD Thesis
2022.
2021

Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 26, iss. 3, pp. 1412-1421, 2021.
2020
Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners Journal Article
In: Mechatronics, Vol. 69, pp. 102371, 2020, 2020.

Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure Conference
American Control Conference (Accepted, forthcoming), 2020.
2017
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

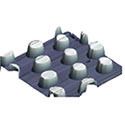
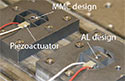
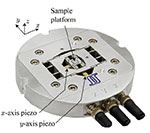
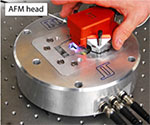
Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
2016

High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.
Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies, Springer, 2016.

Position sensors, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: X. Liu C. Ru,; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies (Under review), Springer, 2016.
2015
Design and Analysis of Scanning Probe Microscopy Cantilevers with Microthermal Actuation Journal Article
In: IEEE Journal of Microelectromechanical Systems, vol. 24, no. 6, pp. 1768 - 1781, 2015.
Low-order damping and tracking control for scanning probe systems Journal Article
In: Mechatronics, Frontiers in Mechanical Engineering, vol. 1, pp. Article 14, 2015.
Low-order Continuous-time Robust Repetitive Control: Application in Nanopositioning Journal Article
In: Mechatronics, vol. 30, pp. 231–243, 2015.
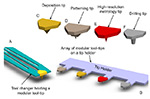
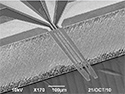
Rapid fabrication of modular nanoscale tool-tips for nano and micro manufacturing Proceedings Article
In: 4M/ICOMM 2015 Conference (Accepted), 2015.
2014
Design, modeling, and control of nanopositioning systems Book
Springer, New York, 2014, ISBN: 3319066161.

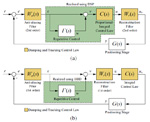
Range-based control of dual-stage nanopositioning systems Journal Article
In: Review of Scientific Instruments, vol. 85, no. 4, pp. 045003 (6 pages), 2014.

Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
2013
Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication Journal Article
In: IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems, vol. 33, no. 6, pp. 86 – 105, 2013.
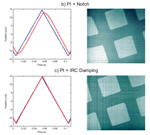
An experimental comparison of PI, inversion, and damping control for high performance nanopositioning Proceedings Article
In: American Control Conference, 2013.
2012
University of Nevada, Reno, Reno, Nevada, 2012.

Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.
Spatial-temporal control of dual-stage nanpositioners Proceedings Article
In: IEEE Control and Decision Conference, 2012.
Overcoming the speed limitations of constant-force mode AFM Proceedings Article
In: Seeing at the Nanoscale 2012, 2012.

Invited Review: High-speed flexure-guided nanopositioning: mechanical design and control Issues Journal Article
In: Review of Scientific Instruments, vol. 83, no. 12, pp. 121101, 2012.
Flexure design using metal matrix composite materials: nanopositioning example Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), 2012.
Dual-stage repetitive control with Prandtl-Ishlinskii hysteresis inversion for piezo-based nanopositioning Journal Article
In: Mechatronics, vol. 22, pp. 271 – 281, 2012.
Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 356 – 369, 2012.
2011

Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners PhD Thesis
Univesity of Nevada, Reno, 2011.

A compact ultra-fast vertical nanopositioner for improving SPM scan speed Journal Article
In: Rev. Sci. Instr., vol. 82, pp. 123703, 2011.
Design and fabrication of an automatic nano tool-tip exchanger for scanning probe microscopy Proceedings Article
In: ASME 2011 International Manufacturing Science and Engineering Conference (MSEC2011), 2011.
2010
Application of an Inverse-Hysteresis Iterative Control Algorithm for AFM Fabrication Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2010.
University of Nevada, Reno, Reno, Nevada, 2010.

Bridging the gap between conventional and video-speed scanning probe microscopes Journal Article
In: Ultramicroscopy, vol. 110, no. 9, pp. 1205 – 1214, 2010.

Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.

Emerging challenges of microactuators for nanoscale positioning, assembly, and manipulation Journal Article
In: ASME Journal of Manufacturing Science and Engineering, Special Issue on Nanomanufacturing, vol. 132, no. 3, pp. 030917 (16 pages), 2010.

Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.
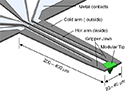
A thermally-activated modular SPM probe for mulitfunctional applications Proceedings Article
In: ASME International Manufacturing Science and Engineering Conference, 2010.
2009
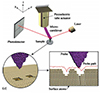
A novel multifunctional SPM probe with modular quick-change tips for fully automated probe-based nanofabrication Proceedings Article
In: Proceedings of NSF Engineering Research and Innovation Conference, 2009.

A review of feedforward control approaches in nanopositioning for high speed SPM Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, no. 6, pp. 061101 (19 pages), 2009.
Design and analysis of discrete-time repetitive control for scanning probe microscopes Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 061103 (12 pages), 2009.

Feedforward control of piezoactuators in atomic force microscope systems: inversion-based compensation for dynamics and hysteresis Journal Article
In: IEEE Cont. Syst. Mag., Special Issue on Hysteresis, vol. 29, no. 1, pp. 70 – 82, 2009.

High-speed serial-kinematic AFM scanner: design and drive considerations Journal Article
In: Asian Journal of Control, Special issue on Advanced Control Methods for Scanning Probe Microscopy Research and Techniques, vol. 11, no. 2, pp. 144 – 153, 2009.
2008
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs, pp. 2028 – 2033, 2008.
Hysteresis inverse iterative learning control of piezoactuators in AFM Proceedings Article
In: 17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems, 2008.
High-speed serial-kinematic AFM scanner: design and drive considerations Proceedings Article
In: American Control Conference, Invited Session on Modeling and Control of SPM, pp. 3188 – 3193, 2008.
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.
Design and fabrication of a multifunctional scanning probe with integrated tip changer for fully automated nanofabrication Proceedings Article
In: 23rd ASPE Anual Meeting and 12th ICPE, 2008.

Charge drives for scanning probe microscope positioning stages Journal Article
In: Ultramicroscopy, vol. 108, pp. 1551–1557, 2008.
2007

Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators Journal Article
In: IEEE Trans. Cont. Syst. Tech., vol. 15, no. 5, pp. 927 – 935, 2007.
2006

Design of hysteresis-compensating iterative learning control for piezo positioners: application to atomic force microscopes Journal Article
In: Mechatronics, vol. 16, no. 3--4, pp. 141 – 158, 2006.
2004
Iterative learning control of piezo positioners for long-range SPM-based nanofabrication Proceedings Article
In: The 3rd IFAC Symposium on Mechatronic Systems, 2004.
University of Washington, 2004.
Control issues in high-speed AFM for biological applications: collagen imaging example Journal Article
In: Asian Journal of Control, Special issue on Advances in Nanotechnology Control, vol. 6, no. 2, pp. 164-178, 2004.
2003

Iterative feedforward compensation of hysteresis in piezo positioners Proceedings Article
In: IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives, pp. 2626 - 2631, 2003.
2002
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
Continuous- and discrete-time state-space modeling (a contributed chapter) Book Chapter
In: Bishop, R. (Ed.): The CRC Mechatronics Handbook, pp. 40-54, The CRC Press, 2002.
