




2026

M. N. Goodell, J. M. Anderson, K. K. Leang
Mobile-robotic Sensor for Estimation and Localization of Multiple Chemical-gas Leaks: A Find- and-Consume Infotaxis Approach Journal Article
In: Robotics and Autonomous Systems, vol. 202, pp. 105431, 2026.
@article{GoodellMN_2026,
title = {Mobile-robotic Sensor for Estimation and Localization of Multiple Chemical-gas Leaks: A Find- and-Consume Infotaxis Approach},
author = {M. N. Goodell, J. M. Anderson, K. K. Leang
},
url = {http://www.kam.k.leang.com/academics/pubs/GoodellMN_2026.pdf},
doi = {https://doi.org/10.1016/j.robot.2026.105431},
year = {2026},
date = {2026-04-11},
urldate = {2026-04-11},
journal = {Robotics and Autonomous Systems},
volume = {202},
pages = {105431},
abstract = {Rapid assessment and localization of accidental or malicious chemical-gas leaks can save lives and minimize environmental impact. An approach is described that quickly estimates and localizes multiple gas leaks using a network of mobile (ground and aerial) robotic sensors. Using the concepts of foraging and consuming food, Bayesian estimation, and information-theoretic motion planning, multiple chemical-gas leaks are found, one source after another. The find-and-consume infotaxis approach makes no assumptions about the total number of sources in a prescribed search area, but it assumes multiple, spatially-distributed gas leaks of the same chemical. Through detailed simulations, metrics such as the correct number of sources identified, the speed of identification, and the source-term estimation accuracy are quantified. These measures are compared to two standard source-finding strategies: (1) raster-scanning and (2) biased-random walk. The results show that the proposed infotaxis method outperforms the two standard approaches, specifically being able to correctly identify up to 10 individual sources 74% of the time on average with an average localization error of approximately 1.2%. Finally, the results from physical experiments using up to four mobile robot platforms equipped with gas sensors (ground and aerial platforms) show successful estimation and localization of three live methane gas leaks, with an average localization error of 4.4%.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

J. M. Anderson; K. K. Leang
Information-based Supervised Learning of In-proximity Effects for 3D Distance Estimation and Collision Avoidance Journal Article
In: IEEE Robotics and Automation Letters, vol. 11, iss. 5, pp. 5398-5405, 2026.
@article{AndersonJM_2026_RAL,
title = { Information-based Supervised Learning of In-proximity Effects for 3D Distance Estimation and Collision Avoidance},
author = {J. M. Anderson and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/AndersonJM_2026_RAL.pdf},
doi = {10.1109/LRA.2026.3665068},
year = {2026},
date = {2026-02-16},
urldate = {2026-02-16},
journal = {IEEE Robotics and Automation Letters},
volume = {11},
issue = {5},
pages = {5398-5405},
abstract = {In-proximity effects (IPE) in 3D, specifically in-ground, in-ceiling, and in-wall effects, experienced by a rotary-wing aerial robot when it flies near obstacles are leveraged for obstacle distance estimation and collision-free motion control. The proposed concept of processing onboard motor commands and inertial measurement unit (IMU) signals enables the robot to essentially ``feel'' the presence of nearby obstacles through aerodynamic interactions. The physics of IPE, along with Shannon information, are used to tailor the input space and train a deep neural network (DNN) to estimate the distance to ground, ceiling, and wall features. Simulation and physical experimental results demonstrate reliable and robust obstacle detection and collision avoidance with a median distance estimation accuracy of 93.35%, 89.22%, and 90.67% for ground, ceiling, and wall, respectively. This new form of ``sensing'' is advantageous in environments where traditional proximity sensors and vision-based obstacle detection systems may not be reliable, such as in foggy, smokey, or dusty environments where perception is limited.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2025
J. M. Anderson, K. K. Leang
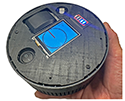
Smart Chemical Sensing Payload for Emergency Response Uncrewed Autonomous Systems Journal Article
In: ASME Journal of Autonomous Vehicles and Systems, vol. 5, iss. 4, no. 041002 (10 pages), 2025.
@article{AndersonJM_2025_JAVS,
title = {Smart Chemical Sensing Payload for Emergency Response Uncrewed Autonomous Systems},
author = {J. M. Anderson, K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/AndersonJM_2025_JAVS.pdf},
year = {2025},
date = {2025-10-21},
urldate = {2025-10-21},
journal = {ASME Journal of Autonomous Vehicles and Systems},
volume = {5},
number = {041002 (10 pages)},
issue = {4},
abstract = {A novel smart sensor payload for uncrewed autonomous systems and emergency responders with the ability to automatically detect, estimate, and locate chemical sources is presented. The smart-sensing device fuses Bayesian inference machine learning with information-theoretic motion planning for fast source estimation and localization performance. More specifically, chemical concentration is measured by a recently developed microelectromechanical-system (MEMS)-based sensor, the location and the size of a chemical leak are estimated using a Bayesian inference machine learning process, and information-theoretic motion planning is used to optimally guide the user or an autonomous mobile robot during the search process to improve the speed and accuracy of localizing and quantifying a leaking gas source. Experiments are performed that compare the device's leak-source estimation and localization performance between two different motion planning methods: (1) moving the device as instructed by the information-based, guided-motion planner and (2) randomly moving the device for search (baseline approach). By following the device's visual cues on where to take measurements (guided-motion method), on average, the smart chemical sensor locates a source over 170% faster than moving the sensor randomly (unguided motion method). Additionally, the leak localization error is less than 6.4% (0.325 m). Finally, live methane gas release experiments are performed to further demonstrate real-world application of the smart handheld chemical-sensing device.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

J. R. Bourne, K. K. Leang
Intelligent Flying Chemical Sensor Network for Gas-leak Localization and Mapping Journal Article
In: ASME Letters in Translational Robotics, vol. 1, iss. 3, pp. 031003 (12 pages), 2025.
@article{BourneJR_2026,
title = {Intelligent Flying Chemical Sensor Network for Gas-leak Localization and Mapping},
author = {J. R. Bourne, K. K. Leang},
year = {2025},
date = {2025-09-01},
urldate = {2026-01-02},
journal = {ASME Letters in Translational Robotics},
volume = {1},
issue = {3},
pages = {031003 (12 pages)},
abstract = {This paper describes the development of a network of intelligent flying robotic sensors for quick and precise localization, estimation, and mapping of chemical-gas leaks. The key advances of the technology include leveraging decentralized Bayesian inference machine learning for source-term estimation, minimizing uncertainty through coordinated bio-inspired actions between robots, incorporating open-sector collision avoidance for safe autonomous navigation during search, and utilizing a kernel-based chemical distribution process to create chemical concentration maps. Simulation and real-world outdoor field tests with propane gas demonstrate the effectiveness of the flying-sensor network. This multi-robot system can assist emergency responders in assessing and containing the spread of dangerous chemical leaks.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

C. G. Kou, J. R. Stoll, K. K. Leang
Impact of Surface Roughness on Quasi-Steady In-Ground Effect for Hover-capable Aerial Vehicles Journal Article
In: International Journal of Micro Aerial Vehicles, vol. 17, 2025.
@article{KouCG_2025IJMAV,
title = {Impact of Surface Roughness on Quasi-Steady In-Ground Effect for Hover-capable Aerial Vehicles},
author = {C. G. Kou, J. R. Stoll, K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/KouGC_2025IJMAV.pdf},
doi = {https://doi.org/10.1177/175682932513500},
year = {2025},
date = {2025-06-19},
urldate = {2025-06-19},
journal = {International Journal of Micro Aerial Vehicles},
volume = {17},
abstract = {Ground effect (GE) behavior occurs when a hover-capable multirotor aerial vehicle, such as a quadcopter, flies within close proximity to the ground and the vehicle experiences an increase in thrust despite constant power being applied to the propellers. Current GE models assume that the ground plane is flat and smooth. This paper investigates the influence of aerodynamically-rough surfaces on GE behavior for standard two-blade propellers under quasi-steady hover conditions. First, a nondimensional model is proposed that incorporates the aerodynamic roughness and zero-plane displacement height of a rough surface with GE parameters previously found in the literature. Second, a GE model that accounts for surface roughness is described. Third, physical experiments are conducted to quantify the aerodynamic properties of controlled rough surfaces and the GE strength through observations of in-ground effect (IGE) and out-of-ground effect (OGE) thrusts produced by commercially available propellers. The results show that aerodynamically rougher surfaces corresponded to higher IGE thrust. Fourth, statistical analysis of the results supported the accuracy of the proposed model, where the average root-mean-squared error is 0.90% with an average maximum error of 2.39% over all test scenarios. Finally, nondimensional analysis confirmed that when similarity conditions are met, the proposed model follows theoretical projections. These findings can be exploited for vehicle motion control, navigation, and design.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
X. He, K. K. Leang
Rotorcraft in-ground effect models in axial and forward flight Journal Article
In: Aerospace Science and Technology, vol. 156, pp. 109748, 2025.
@article{HeX_2025,
title = {Rotorcraft in-ground effect models in axial and forward flight},
author = {X. He, K. K. Leang},
doi = {https://doi.org/10.1016/j.ast.2024.109748},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {Aerospace Science and Technology},
volume = {156},
pages = {109748},
abstract = {This paper describes in-ground effect (IGE) models that incorporate the rotor advance ratio and vehicle's climbing velocity to predict the IGE thrust variation in axial (vertical) and forward flight for rotor-based aerial vehicles. Extensive experiments are conducted to validate each and every component of the new IGE models. Discrepancies between the analytical and experimental results in forward flight are found consistent with the two characteristic flow regimes of recirculation and ground vortex. In particular, an additional thrust increase at a low advance ratio (<0.04) in an extreme ground-effect regime (z/R<0.5) is observed. The results of this study can be leveraged to develop new vehicle motion control and path planning algorithms for flight near obstacles.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2024

K. C. Hoffman, J. M. Anderson, K. K. Leang
Rapid Airborne Gas-plume Mapping and Source Localization with Feedforward Gas-sensor Dynamics Compensation Journal Article
In: ASME Letters in Dynamic Systems and Control, vol. 4, no. 4, pp. 041002, 2024.
@article{HoffmanKC_2025_LDSC,
title = {Rapid Airborne Gas-plume Mapping and Source Localization with Feedforward Gas-sensor Dynamics Compensation},
author = {K. C. Hoffman, J. M. Anderson, K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/HoffmanKC_2024.pdf},
doi = {https://doi.org/10.1115/1.4066513},
year = {2024},
date = {2024-09-30},
urldate = {2024-09-30},
journal = {ASME Letters in Dynamic Systems and Control},
volume = {4},
number = {4},
pages = {041002},
abstract = {This paper focuses on improving the speed, accuracy, and robustness of autonomous aerial-based chemical-sensing for plume mapping and source localization through characterizing, modeling, and feedforward compensation of gas sensor dynamics. First, the dynamics of three types of gas sensors are modeled. Second, the maximum chemical mapping speed is calculated and shown to be inversely proportional to sensor time constant. Third, an inversion-based approach is used to compensate for the sensor dynamics to improve mapping throughput. Results show that dynamics compensation enhances the chemical-mapping speed by over five times compared to the uncompensated case. Finally, to further demonstrate utility, the approach is applied to a particle swarm optimization example for plume-source localization. The improvement is observed by how well the agents converge to the true chemical-gas source location when gas-sensor dynamics are taken into account. Specifically, for a static Gaussian plume source, feedforward compensation leads to 64% average improvement in localization success; and for a dynamic Quick Urban and Industrial Complex (QUIC) dispersion plume source, a 39% average improvement is observed. These results underscore the importance of sensor-dynamics compensation for enhancing mapping and source localization throughput, accuracy, and robustness.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

N. R. Olsen; S. M. McKee; O. S. Haddadin; S. M. Lyon; J. E. Campbell; K. K. Leang
Information-Theoretic Bayesian Inference for Multi-Agent Localization and Tracking of an RF Target with Unknown Waveform Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue on Data-Driven Modeling and Control of Dynamical Systems (https://doi.org/10.1115/1.4066453), vol. 146, iss. 6, pp. 061104, 2024.
@article{OlsenNR_2024_JDSMC,
title = {Information-Theoretic Bayesian Inference for Multi-Agent Localization and Tracking of an RF Target with Unknown Waveform},
author = {N. R. Olsen and S. M. McKee and O. S. Haddadin and S. M. Lyon and J. E. Campbell and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/OlsenNR_2024_JDSMC.pdf},
doi = {10.1115/1.4065592},
year = {2024},
date = {2024-08-22},
urldate = {2024-08-22},
journal = {ASME J. Dyn. Syst. Meas. and Cont., Special Issue on Data-Driven Modeling and Control of Dynamical Systems (https://doi.org/10.1115/1.4066453)},
volume = {146},
issue = {6},
pages = {061104},
abstract = {Information-theoretic motion planning and machine learning through Bayesian inference are exploited to localize and track a dynamic radio frequency (RF) emitter with unknown
waveform (uncooperative target). A target-state estimator handles non-Gaussian distributions, while mutual information is utilized to coordinate the motion control of a network of mobile sensors (agents) to minimize measurement uncertainty. The mutual information is computed for pairs of sensors through a four-permutation-with-replacement process. The information surfaces are combined to create a composite map, which is then used by agents to plan their motion for more efficient and effective target estimation and tracking. Simulations and physical experiments involving micro-aerial vehicles with time difference of arrival (TDOA) measurements are performed to evaluate the performance of the algorithm. Results show that when two or three agents are used, the algorithm outperforms state-of-the-art methods. Results also show that for four or more agents, the performance is as competitive as an idealized static sensor network.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
waveform (uncooperative target). A target-state estimator handles non-Gaussian distributions, while mutual information is utilized to coordinate the motion control of a network of mobile sensors (agents) to minimize measurement uncertainty. The mutual information is computed for pairs of sensors through a four-permutation-with-replacement process. The information surfaces are combined to create a composite map, which is then used by agents to plan their motion for more efficient and effective target estimation and tracking. Simulations and physical experiments involving micro-aerial vehicles with time difference of arrival (TDOA) measurements are performed to evaluate the performance of the algorithm. Results show that when two or three agents are used, the algorithm outperforms state-of-the-art methods. Results also show that for four or more agents, the performance is as competitive as an idealized static sensor network.
2022

N. R. Olsen, S. M. McKee, O. S. Haddadin, S. Lyon, J. Campbell, K. K. Leang
Information-Based Mobile Sensor Network Localization and Tracking of an Uncooperative Target Proceedings Article
In: IEEE Military Communications Conference (MILCOM), November 28 - December 2, Rockville, MD, USA, pp. 490-495, 2022.
@inproceedings{OlsenNR_2022_MILCOM,
title = {Information-Based Mobile Sensor Network Localization and Tracking of an Uncooperative Target},
author = {N. R. Olsen, S. M. McKee, O. S. Haddadin, S. Lyon, J. Campbell, K. K. Leang},
doi = {10.1109/MILCOM55135.2022.10017826},
year = {2022},
date = {2022-12-02},
urldate = {2022-12-02},
booktitle = {IEEE Military Communications Conference (MILCOM), November 28 - December 2, Rockville, MD, USA},
pages = {490-495},
abstract = {This paper focuses on the localization and tracking of a radio frequency (RF) emitter with unknown waveform (uncooperative target) using an information-based centralized network of mobile, collaborative sensors (agents). Each agent utilizes the measured waveform parameters such as time difference of arrival (TDOA), frequency difference of arrival (FDOA), or differential received signal strength (DRSS). The proposed algorithm leverages Bayesian estimation to handle non-Gaussian measurements and it employs information-theoretic motion planning to move sensors to areas of high information-gain to minimize measurement uncertainty. Mutual information is computed for pairs of sensor through a four-permutation with replacement process. The generated mutual information surfaces are combined and then used to plan the motion of each sensor in the network. Simulation results involving TDOA measurements are presented to illustrate the effectiveness of the algorithm, where it is shown that three agents are able to accurately track a target that moves at the same speed as the agents.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
N. R. Olsen
Information-Based Mobile Sensor Network Coordination for Localizing and Tracking of an Uncooperative Target Masters Thesis
2022.
@mastersthesis{OlsenNR_2022MS,
title = {Information-Based Mobile Sensor Network Coordination for Localizing and Tracking of an Uncooperative Target},
author = {N. R. Olsen},
year = {2022},
date = {2022-11-09},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
M. Goodell
Bayesian Find-and-Consume Strategy for Mobile Robotic Sensor Networks: Estimating and Localizing Multiple Gas Leaks Masters Thesis
2022.
@mastersthesis{GoodellM_2022_MS,
title = {Bayesian Find-and-Consume Strategy for Mobile Robotic Sensor Networks: Estimating and Localizing Multiple Gas Leaks},
author = {M. Goodell},
year = {2022},
date = {2022-05-28},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
2021

N. Gunawardena, K. K. Leang; E. R. Pardyjak
Particle swarm optimization for source localization in realistic complex urban environments Journal Article
In: Atmospheric Environment, vol. 262, pp. 118636, 2021.
@article{GunawardenaN_2021,
title = {Particle swarm optimization for source localization in realistic complex urban environments},
author = {N. Gunawardena, K. K. Leang and E. R. Pardyjak},
doi = {https://doi.org/10.1016/j.atmosenv.2021.118636},
year = {2021},
date = {2021-07-30},
journal = {Atmospheric Environment},
volume = {262},
pages = {118636},
abstract = {In this work, we present a method to localize a source in complex urban environments using particle swarm optimization (PSO). Instead of using PSO to minimize the difference between a plume model and measurements as is often done, PSO is run such that each particle is modeled by an unmanned aerial vehicle (UAV) that measures and directly finds the global maximum of the concentration field. Several modifications were made to PSO to allow it to perform successfully in this application. The synthetic data used to test PSO were produced using the 3D building resolving Quick Urban & Industrial Complex Dispersion Modeling System (QUIC), and PSO was implemented in Python. Three different domains were tested: (1) a case with no obstacles, (2) a case with four large obstacles, and (3) a real-world case modeled after the Joint Urban 2003 experiment in Oklahoma City. We found that PSO works well in idealized and real cases. In the Oklahoma City simulation, approximately 90% of the PSO runs with 10 particles make it to within 1% of the maximum domain distance to the source, and approximately 98% of the PSO runs with 50 particles make it to within 1% of the maximum domain distance to the source. However, PSO is not completely immune to local maxima, and there is the possibility of convergence to the wrong point in the domain. The insight from this study can be used to inform first responders or create a tool that can be implemented on UAVs to locate a contaminant source.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

K. R. Jenson-Nau, T. Hermans; K. K. Leang
Near-Optimal Area-Coverage Path Planning of Energy Constrained Aerial Robots with Application in Autonomous Environmental Monitoring Journal Article
In: IEEE Trans. on Automation Science and Engineering, vol. 18, iss. 3, pp. 1453-1668, 2021.
@article{JensonNau_2021_TASE,
title = {Near-Optimal Area-Coverage Path Planning of Energy Constrained Aerial Robots with Application in Autonomous Environmental Monitoring},
author = {K. R. Jenson-Nau, T. Hermans and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/JensonNauK_2020.pdf},
doi = {10.1109/TASE.2020.3016276},
year = {2021},
date = {2021-07-01},
urldate = {2020-08-31},
journal = {IEEE Trans. on Automation Science and Engineering},
volume = {18},
issue = {3},
pages = {1453-1668},
abstract = {This article describes a Voronoi-based path generation (VPG) algorithm for an energy-constrained mobile robot, such as an unmanned aerial vehicle (UAV). The algorithm solves a variation of the coverage path-planning problem where complete coverage of an area is not possible due to path-length limits caused by energy constraints on the robot. The algorithm works by modeling the path as a connected network of mass-spring-damper systems. The approach further leverages the properties of Voronoi diagrams to generate a potential field to move path waypoints to near-optimal configurations while maintaining path-length constraints. Simulation and physical experiments on an aerial vehicle are described. Simulated runtimes show linear-time complexity with respect to the number of path waypoints. Tests in variously shaped areas demonstrate that the method can generate paths in both convex and nonconvex areas. Comparison tests with other path generation methods demonstrate that the VPG algorithm strikes a good balance between runtime and optimality, with significantly better runtime than direct optimization, lower cost coverage paths than a lawnmower-style coverage path, and moderately better performance in both metrics than the most conceptually similar method. Physical experiments demonstrate the applicability of the VPG method to a physical UAV, and comparisons between real-world results and simulations show that the costs of the generated paths are within a few percent of each other, implying that analysis performed in simulation will hold for real-world application, assuming that the robot is capable of closely following the path and a good energy model is available.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Cheng Gordon Kou
The Effect of Surface Roughness on Quasi-Steady in-Ground Effect for Multirotor Aerial Vehicles Masters Thesis
University of Utah, 2021.
@mastersthesis{KouG_2021,
title = {The Effect of Surface Roughness on Quasi-Steady in-Ground Effect for Multirotor Aerial Vehicles},
author = {Cheng Gordon Kou},
year = {2021},
date = {2021-06-19},
school = {University of Utah},
abstract = {When a rotorcraft aerial vehicle comes within close proximity to the ground, the vehicle experiences an increase in thrust despite constant power being applied to the propellers. This behavior is known as ground effect (GE). Current GE models for multirotor aerial vehicles assume that the ground plane is flat and smooth. However, very little is known about the impact of surface roughness on GE. This thesis investigates the influence of aerodynamically-rough surfaces on ground effect behavior, specifically, in the case of a single rotor blade in quasi-steady hover. A nondimensional model is derived that incorporates the aerodynamic roughness and zero-plane displacement height of a rough surface with GE parameters previously found in literature. A new GE model that accounts for surface roughness is proposed. Physical experiments are conducted to measure the aerodynamic properties of controlled surfaces and to measure GE strength through observations of in-ground effect and out-of-ground effect thrusts. Statistical and nondimensional analysis are used to validate the proposed model. The results show that the average root-mean-squared error for all test surfaces is 0.90% with an average maximum error of 2.39% for the blades used. The results suggest that the proposed model effectively captures the impact of surface roughness on IGE, and the findings can be exploited for motion control and vehicle design.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
2020

X. He; K. K. Leang
Quasi-Steady In-Ground-Effect Model for Single and Multi-Rotor Aerial Vehicles Journal Article
In: AIAA Journal, vol. 58, no. 2, pp. 5318 - 5331, 2020.
@article{HeX_2019_AIAA_Journal,
title = {Quasi-Steady In-Ground-Effect Model for Single and Multi-Rotor Aerial Vehicles},
author = {X. He and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/HeX_2020_AIAA.pdf},
doi = {10.2514/1.J059223},
year = {2020},
date = {2020-11-01},
journal = {AIAA Journal},
volume = {58},
number = {2},
pages = {5318 - 5331},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

M. N. Goodell, T.E. Truong, S. R. Marston, B. J. Smiley, E. R. Befus, A. Bingham, K. Allen, J. R. Bourne, Y. Wei, K. E. Magargal, V. Ganesan, D. L. Mendoza, A. C. Seth, S. A. Harwood, M. Bodson, T. Hermans; K. K. Leang
Autonomous Light Assessment Drone for Dark Skies Studies Proceedings Article
In: ASME Dynamic Systems and Control Conference (Virtual conference), October 4-7, 2020, 2020.
@inproceedings{GoodellM_2020_DSCC,
title = {Autonomous Light Assessment Drone for Dark Skies Studies},
author = {M. N. Goodell, T.E. Truong, S. R. Marston, B. J. Smiley, E. R. Befus, A. Bingham, K. Allen, J. R. Bourne, Y. Wei, K. E. Magargal, V. Ganesan, D. L. Mendoza, A. C. Seth, S. A. Harwood, M. Bodson, T. Hermans and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/GoodellMN_2020_DSCC.pdf},
year = {2020},
date = {2020-10-17},
booktitle = {ASME Dynamic Systems and Control Conference (Virtual conference), October 4-7, 2020},
abstract = {The improper use of artificial light causing skyglow is detrimental to many types of wildlife and potentially causes irregular human sleeping patterns. Studies have been performed to analyze light pollution on a global scale. However, light pollution data on a local scale is not often available and the effects at local scale have rarely been studied. Herein, a new way of evaluating light pollution at local scale by deploying a custom-designed autonomous light assessment drone (ALAD) is described. The ALAD is designed and equipped with a sky quality meter (SQM) to measure skyglow and a low-cost illuminance sensor to measure light from artificial sources. Outdoor field tests are performed at a remote site in central Utah and the measured results are validated against data from lightpollutionmap.info. The SQM measurements are in agreement with the estimates from the light pollution map, and the initial results demonstrate feasibility of the ALAD for local-scale skyglow assessment.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

J. R. Bourne, M. Goodell, X. He, J. Steiner; K. K. Leang
Decentralized Multi-Agent Information-Theoretic Control for Target Estimation and Localization: Finding Chemical Leaks Journal Article
In: International Journal of Robotics Research, vol. 39, no. 13, pp. 1525 - 1548, 2020.
@article{BourneJR_2020_IJRR,
title = {Decentralized Multi-Agent Information-Theoretic Control for Target Estimation and Localization: Finding Chemical Leaks},
author = {J. R. Bourne, M. Goodell, X. He, J. Steiner and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/BourneJR_2020_IJRR.pdf},
doi = {https://doi.org/10.1177/0278364920957090},
year = {2020},
date = {2020-07-17},
urldate = {2020-07-17},
journal = {International Journal of Robotics Research},
volume = {39},
number = {13},
pages = {1525 - 1548},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
D. Guo; K. K. Leang
Image-based Estimation, Planning, and Control for High-speed Flying through Multiple Openings Journal Article
In: International Journal of Robotics Research, Vol. 39, No. 9, pp. 122-1137, 2020, 2020.
@article{GuoD_2019_IJRR,
title = {Image-based Estimation, Planning, and Control for High-speed Flying through Multiple Openings},
author = {D. Guo and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/GuoD_2020_IJRR.pdf},
doi = {https://doi.org/10.1177/0278364920921943},
year = {2020},
date = {2020-06-27},
journal = {International Journal of Robotics Research, Vol. 39, No. 9, pp. 122-1137, 2020},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Joseph R. Bourne
Decentralized multi-agent information theoretic target localization and estimation: finding and predicting chemical gas leaks PhD Thesis
University of Utah, 2020.
@phdthesis{BourneJR_2020b,
title = {Decentralized multi-agent information theoretic target localization and estimation: finding and predicting chemical gas leaks},
author = {Joseph R. Bourne},
year = {2020},
date = {2020-06-13},
urldate = {2020-06-13},
school = {University of Utah},
abstract = {The goal of this dissertation is to quickly and autonomously localize and estimate an unknown target, such as a chemical leak, using a team of mobile robots. Accidental or malicious release of chemical, biological, radiological, nuclear, or explosive (CBRNE) substances can have devastating effects on humans, animals, infrastructure, and the environment. Thus, fast and accurate localization and estimation of a contaminant release are crucial to saving lives and minimizing damage. To achieve the goal, stochastic estimation and motion planning algorithms are developed, where the performance of two distinct methods for coordinating the mobile robot team are studied. First, a new non-parametric Bayesian-based motion planning algorithm for autonomous plume source term estimation (STE) and source seeking (SS) is developed. Robots coordinate their movements by parsing the belief into multiple modes and they investigate these modes through model-based bio-inspired SS actions. Simulation and experimental results show consistently that the coordinated Bayesian-based STE and SS algorithm outperforms traditional bio-inspired SS and raster-scanning methods, where performance is approximately twice as fast as the uncoordinated case. Second, a new decentralized multi-agent information-theoretic (De-
MAIT) control algorithm that leverages Bayesian estimation and guides robots to minimize uncertainty is developed. The algorithm consists of: (1) a non-parametric Bayesian estimator,
(2) an information-theoretic trajectory planner that generates “informative trajectories” for an agent to follow, and (3) a controller and collision avoidance algorithm that ensure agents follow the trajectory as closely as possible in a safe manner. Simulation results show that the DeMAIT algorithm’s average localization success rate is higher and more robust to changes in the source location, robot team size, and search area size, compared to the coordinated bio-inspired method. Outdoor field experiments are conducted using a team of custom-built aerial robots equipped with gas concentration sensors to estimate and find the source of a propane gas leak to demonstrate efficacy of the DeMAIT algorithm.},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
MAIT) control algorithm that leverages Bayesian estimation and guides robots to minimize uncertainty is developed. The algorithm consists of: (1) a non-parametric Bayesian estimator,
(2) an information-theoretic trajectory planner that generates “informative trajectories” for an agent to follow, and (3) a controller and collision avoidance algorithm that ensure agents follow the trajectory as closely as possible in a safe manner. Simulation results show that the DeMAIT algorithm’s average localization success rate is higher and more robust to changes in the source location, robot team size, and search area size, compared to the coordinated bio-inspired method. Outdoor field experiments are conducted using a team of custom-built aerial robots equipped with gas concentration sensors to estimate and find the source of a propane gas leak to demonstrate efficacy of the DeMAIT algorithm.

D. Guo; K. K. Leang
Image-Based Estimation, Planning, and Control of Cable-Suspended Payload for Package Delivery Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2698-2705, 2020.
@article{GuoD_2020_RAL,
title = {Image-Based Estimation, Planning, and Control of Cable-Suspended Payload for Package Delivery},
author = {D. Guo and K. K. Leang},
doi = {10.1109/LRA.2020.2972855 },
year = {2020},
date = {2020-01-29},
journal = {IEEE Robotics and Automation Letters},
volume = {5},
number = {2},
pages = {2698-2705},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Xiang He
Modeling and Control of In-Ground-Effect on Rotorcraft Unmanned Aerial Vehicles PhD Thesis
University of Utah, 2020.
@phdthesis{HeX_2020_PhD,
title = {Modeling and Control of In-Ground-Effect on Rotorcraft Unmanned Aerial Vehicles},
author = {Xiang He},
year = {2020},
date = {2020-01-11},
school = {University of Utah},
abstract = {The goal of this dissertation is to model and control the behavior of in-ground-effect (IGE) on multirotor unmanned aerial vehicles (UAVs). Ground effect, or rotor IGE, is a common phenomenon experienced by rotorcraft aerial vehicles when taking off, landing on, hovering around, or flying near surfaces or obstacles. Rotor IGE is caused by aerodynamic interaction between the rotor wake and the nearby obstacle. In particular, the deformed wake causes changes in the induced velocity, which leads to drastic changes in rotor thrust and torque that make flight control in confined spaces difficult and challenging. Many of the existing models for IGE are based on work on helicopters from the early 1940s and more so from the 1950s. Many of these models, unfortunately, are not directly applicable to smaller rotorcraft aerial vehicles due to the assumptions that were made. Also, many of these models suffer from singularities at certain heights, and many of them are computationally heavy. The contributions of this dissertation are computationally-light and accurate models of IGE and the development of feedback controllers that are effective at handling IGE. First, a quasi-steady IGE model for a single rotor that predicts a finite maximum IGE thrust ratio is developed. An empirical approach is used to establish the base exponential function in the quasi-steady model, followed by exploiting blade element theory (BET) and the semipositive induced velocity assumption to relate two IGE model coefficients to blade geometry. The changes in the rotor IGE for various multirotor configurations are studied, characterized, and modeled with respect to the number of rotors, rotor rotation direction, and minimum rotor tip-to-tip distance. The quasi-steady model also incorporates a newly-discovered fountain-vortex thrust loss effect. The quasi-steady model is experimentally validated for off-the-shelf and variable pitch propellers. Second, the quasi-steady model is extended to capture dynamic IGE by considering vehicle flight states and the partial ground effect where a portion of a rotor operates within the ground-effect region. More specifically, using blade element theory, rotor IGE thrust ratios in forward and axial flight are derived as a function of the advance ratio and climbing speed in the IGE regime. A rotation-based IGE test stand that simulates forward flight is created and used to characterize dynamic IGE and to validate the analytical results. The advance ratio, rotor disk angle of attack (AOA), and various multirotor configurations (transverse and tandem rotor) are investigated using the test stand. The partial ground effect is empirically characterized, and the behavior is incorporated into the dynamic IGE model. Finally, the developed IGE models are exploited for vehicle motion control to account for IGE on a quadrotor helicopter (quadcopter) aerial vehicle flying near the ground surface. Specifically, a feedback-based nonlinear disturbance observer controller and a feedforward IGE compensator are designed, simulated, and implemented. Simulation and experimental results validate the effectiveness of the IGE model and flight controller to compensate for IGE when flying close to the ground.},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
2019

J. R. Bourne; K. K. Leang
Body-pose Bayesian estimation of a snow-avalanche victim: a method for first responders and/or aerial robots to quickly locate a buried victim Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
@inproceedings{BourneJR_2019_DSCC,
title = {Body-pose Bayesian estimation of a snow-avalanche victim: a method for first responders and/or aerial robots to quickly locate a buried victim},
author = {J. R. Bourne and K. K. Leang},
year = {2019},
date = {2019-10-10},
urldate = {2019-10-10},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
J. R. Bourne, E. Pardyjak, K .K. Leang
Coordinated Bayesian-based Bio-Inspired Plume Source Term Estimation and Source Seeking for Mobile Robots Journal Article
In: IEEE Transactions on Robotics (DOI: 10.1109/TRO.2019.2912520), vol. 35, no. 4, pp. 967-986, 2019.
@article{BourneJR_2018a,
title = {Coordinated Bayesian-based Bio-Inspired Plume Source Term Estimation and Source Seeking for Mobile Robots},
author = {J. R. Bourne, E. Pardyjak, K .K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/BourneJR_2019_TRO.pdf},
year = {2019},
date = {2019-05-28},
urldate = {2019-05-28},
journal = {IEEE Transactions on Robotics (DOI: 10.1109/TRO.2019.2912520)},
volume = {35},
number = {4},
pages = {967-986},
abstract = {A new non-parametric Bayesian-based motion planning algorithm for autonomous plume source term estimation (STE) and source seeking (SS) is presented. The algorithm is designed for mobile robots equipped with gas concentration sensors. Specifically, robots coordinate and utilize a Gaussian-plume likelihood model in a Bayesian-based STE process, then simultaneously search for and navigate toward the source through model-based, bio-inspired SS methods such as biased-random walk and surge-casting. Compared to state-of-the-art Bayesian and sensor-based STE/SS motion planners, the strategy described takes advantage of coordination between multiple robots and the estimated plume model for faster and more robust SS, rather than relying on direct (or filtered) sensor measurements which can be highly sensitive to noise and unsteady atmospheric conditions. A set of Monte Carlo simulation studies are conducted to compare the performance between the uncoordinated and coordinated algorithms for different robot team sizes and starting conditions. Additionally, the algorithms are validated experimentally through a laboratory-safe, realistic humid-air plume that behaves similar to gas plumes, to test STE and SS using mobile ground robots equipped with low-cost humidity sensors. Simulation and experimental results show consistently that the coordinated Bayesian-based STE and SS algorithm outperforms traditional bio-inspired SS algorithms and is approximately twice as fast as the uncoordinated case. Finally, the plume source is distorted to study the algorithm’s limitations and impact on STE and SS, where results show that even for distorted plumes, useful source localization information can be obtained.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Dejun Guo
Dynamic and Aggressive Image-Based Flying in GPS-Denied Environments: Estimation, Motion Planning, and Control PhD Thesis
University of Utah, 2019.
@phdthesis{GuoD_2019_PhD,
title = {Dynamic and Aggressive Image-Based Flying in GPS-Denied Environments: Estimation, Motion Planning, and Control},
author = {Dejun Guo},
year = {2019},
date = {2019-05-18},
school = {University of Utah},
abstract = {The goal of this dissertation is to enable an aerial robotic system (including an aircraft with a cable-suspended payload) to fly autonomously in GPS-denied environments through vision from a single monocular camera. To achieve this goal, new estimation, motion planning, and control algorithms that exploit the image-based visual-servo framework are developed. Rigorous stability analysis based on the Lyapunov approach is also presented for the developed control systems. The image-based framework is of interest because of its robustness to image noise and lower computational demand compared to position-based techniques where pose estimation is required. However, this research tackles inherent challenges including nonlinear dynamics, singularity issues, and complex stability analysis for cases with relaxed constraints on initial estimation errors, vehicle position, and height. The resulting theoretical outcomes are validated experimentally by showing demonstrations of aerial-robot assisted operations related to emergency response, search and rescue, and package delivery in GPS-denied environments, such inside of buildings or in urban canyons where global vehicle localization and control schemes are ineffective or impractical. Firstly, a new kinematic image-based control algorithm using a mobile overhead camera for aerial robots is developed. The control algorithm exploits adaptation to compensate for uncertainties in the camera parameters and depth information, and repetitive control is used to reject inherent periodic tracking errors in the image plane. Stability analysis in the Lyapunov sense is shown. Both simulations and physical experiments are provided for a quadcopter to demonstrate the approach. Secondly, a new nonlinear flight control scheme that combines a vision-based closed-loop observer with a backstepping-based controller using an onboard camera and the inertial measurement unit (IMU) is developed. This new approach is computationally efficient and asymptotically stable. Flight tests are conducted to validate the algorithm’s capabilities for take-off, to hover, to track trajectory, and landing. Finally, a new flight control scheme that combines an image-based position controller and a quaternion-based attitude controller are created that enables and aerial robot to fly aggressively through several narrow windows without knowledge of the robot's position and window size, and the approach is extended to control the motion of a cable-suspended payload for package delivery. Both simulations and physical experiments demonstrate that the approaches are capable of flying into and out of a small house and picking up and transporting several packages with unknown mass.},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
X. He; K. K. Leang
A New Quasi-steady In-Ground Effect Model Rotorcraft Unmanned Aerial Vehicles Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
@inproceedings{HeX_2019_DSCC_IGE,
title = {A New Quasi-steady In-Ground Effect Model Rotorcraft Unmanned Aerial Vehicles},
author = {X. He and K. K. Leang},
year = {2019},
date = {2019-04-16},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

X. He, J. R. Bourne, J. A. Steiner; K. K. Leang
Gaussian-based Kernel for Multi-Agent Aerial Chemical-Plume Mapping Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.
@inproceedings{HeX_2019_DSCC_plume,
title = {Gaussian-based Kernel for Multi-Agent Aerial Chemical-Plume Mapping},
author = {X. He, J. R. Bourne, J. A. Steiner and K. K. Leang},
year = {2019},
date = {2019-04-16},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

J. A. Steiner, J. R. Bourne, X. He, D. Cropek; K. K. Leang
Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
@inproceedings{SteinerJA_2019_DSCC_PSO,
title = {Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments},
author = {J. A. Steiner, J. R. Bourne, X. He, D. Cropek and K. K. Leang},
year = {2019},
date = {2019-04-10},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

X. He, G. Kou, M. Calaf; K. K. Leang,
Multi-rotor In-Ground-Effect Modeling and Adaptive Nonlinear Disturbance Observer for Closed-loop UAV Control Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., Special Issue: "Autonomous Mobile Systems" in Memory of Professor J. Karl Hedrick, vol. 141, pp. 071013 (11 pages), 2019.
@article{HeX_2018_ASMEJDSMC,
title = {Multi-rotor In-Ground-Effect Modeling and Adaptive Nonlinear Disturbance Observer for Closed-loop UAV Control},
author = {X. He, G. Kou, M. Calaf and K. K. Leang,},
year = {2019},
date = {2019-02-11},
journal = {ASME J. Dyn. Syst. Meas. and Cont., Special Issue: "Autonomous Mobile Systems" in Memory of Professor J. Karl Hedrick},
volume = {141},
pages = {071013 (11 pages)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

X. He, J. R. Bourne, J. A. Steiner, C. Mortensen, K. C. Hoffman, C. J. Dudley, B. Rogers, D. M. Cropek; K. K. Leang
Autonomous Chemical Sensing Aerial Robot for Urban/Suburban Environmental Monitoring Journal Article
In: IEEE Systems Journal, Vol. 13, No. 3, pp. 3524 - 3535, 2019.
@article{HeX_2018_ISJ,
title = {Autonomous Chemical Sensing Aerial Robot for Urban/Suburban Environmental Monitoring},
author = {X. He, J. R. Bourne, J. A. Steiner, C. Mortensen, K. C. Hoffman, C. J. Dudley, B. Rogers, D. M. Cropek and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/HeX_2019_ISJ.pdf},
year = {2019},
date = {2019-02-10},
journal = {IEEE Systems Journal, Vol. 13, No. 3, pp. 3524 - 3535},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

J. Steiner, X. He; K. K. Leang
Open-Sector Rapid Reactive Collision Avoidance: Application in Aerial Robot Navigation Through Outdoor Unstructured Environments Journal Article
In: Robotics and Autonomous Systems, vol. 112, pp. 211-220, 2019.
@article{SteinerJ_2019_RA,
title = {Open-Sector Rapid Reactive Collision Avoidance: Application in Aerial Robot Navigation Through Outdoor Unstructured Environments},
author = {J. Steiner, X. He and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/SteinerJA_2019.pdf},
year = {2019},
date = {2019-02-01},
journal = {Robotics and Autonomous Systems},
volume = {112},
pages = {211-220},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2018

D. Guo, H. Wang; K. K. Leang
Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot in GPS-denied Environments Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 6, pp. 061018, 2018.
@article{GuoD_2018_ASME_JMR,
title = {Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot in GPS-denied Environments},
author = {D. Guo, H. Wang and K. K. Leang},
year = {2018},
date = {2018-11-01},
journal = {ASME J. Mechanisms and Robotics},
volume = {10},
number = {6},
pages = {061018},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
E. Andersen
Design and control of a micro aerial vehicle powered with resonant inductive wireless power transfer Masters Thesis
University of Utah, 2018.
@mastersthesis{AndersenE_2018_MS,
title = {Design and control of a micro aerial vehicle powered with resonant inductive wireless power transfer},
author = {E. Andersen},
year = {2018},
date = {2018-10-31},
school = {University of Utah},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
K. Jenson-Nau
Near-optimal area coverage path planning for an energy constrained autonomous mobile robot: application to autonomous aerial chemical sensing Masters Thesis
University of Utah, 2018.
@mastersthesis{JensonJau_2018_MS,
title = {Near-optimal area coverage path planning for an energy constrained autonomous mobile robot: application to autonomous aerial chemical sensing},
author = {K. Jenson-Nau},
year = {2018},
date = {2018-07-31},
school = {University of Utah},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Kyle C. Hoffman
Characterization, Modeling, and Feedforward Compensation of Gas Sensor Dynamics for Aerial Robot Chemical Plume Mapping and Swarm-based Localization Masters Thesis
University of Utah, 2018.
@mastersthesis{HoffmanKC_2018_MS,
title = {Characterization, Modeling, and Feedforward Compensation of Gas Sensor Dynamics for Aerial Robot Chemical Plume Mapping and Swarm-based Localization},
author = {Kyle C. Hoffman},
year = {2018},
date = {2018-07-14},
school = {University of Utah},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}

J. Lee, K. K. Leang, W. Yim
Modular design and control of a fully-actuated hexrotor for aerial manipulation applications Journal Article
In: ASME J. Mechanisms and Robotics, vol. 10, no. 4, pp. 041007, 2018.
@article{LeeJ_2017_ASME_JMR,
title = {Modular design and control of a fully-actuated hexrotor for aerial manipulation applications},
author = {J. Lee, K. K. Leang, W. Yim},
year = {2018},
date = {2018-03-01},
journal = {ASME J. Mechanisms and Robotics},
volume = {10},
number = {4},
pages = {041007},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

G. Plaizier, E. Andersen, B. Truong, X. He, S. Roundy; K. K. Leang
Design, Modeling, and Analysis of Inductive Resonant Coupling Wireless Power Transfer for Micro Aerial Vehicles (MAVs) Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018, pp. 6104-6109, 2018.
@inproceedings{PlaizierG_2018_ICRA,
title = {Design, Modeling, and Analysis of Inductive Resonant Coupling Wireless Power Transfer for Micro Aerial Vehicles (MAVs)},
author = {G. Plaizier, E. Andersen, B. Truong, X. He, S. Roundy and K. K. Leang},
year = {2018},
date = {2018-02-05},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018},
journal = {IEEE International Conference on Robotics and Automation (ICRA) (Under review), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018},
pages = {6104-6109},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2017

D. Guo; K. K. Leang
Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
@inproceedings{GuoD_2017_DSCC,
title = {Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments},
author = {D. Guo and K. K. Leang},
year = {2017},
date = {2017-04-24},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

J. R. Bourne; K. K. Leang
Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
@inproceedings{BourneJR_2017b,
title = {Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor},
author = {J. R. Bourne and K. K. Leang},
year = {2017},
date = {2017-04-21},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

X. He, M. Calaf; K. K. Leang
Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
@inproceedings{HeX_2017ab,
title = {Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs},
author = {X. He, M. Calaf and K. K. Leang},
year = {2017},
date = {2017-04-08},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

D. Guo, J. Bourne, H. Wang, W. Yim; K. K. Leang
Adaptive-Repetitive Visual-Servo Control of Low-Flying Aerial Robots via Uncalibrated High-Flying Cameras Journal Article
In: Journal of Nonlinear Science, Special issue on robotics: mechanics and control of locomotion, vol. 27, no. 4, pp. 1235-1256, 2017.
@article{DejunG_2016a,
title = {Adaptive-Repetitive Visual-Servo Control of Low-Flying Aerial Robots via Uncalibrated High-Flying Cameras},
author = {D. Guo, J. Bourne, H. Wang, W. Yim and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/DejunG_2017a_JNS.pdf},
year = {2017},
date = {2017-03-22},
journal = { Journal of Nonlinear Science, Special issue on robotics: mechanics and control of locomotion},
volume = {27},
number = {4},
pages = {1235-1256},
abstract = {This paper presents the design and implementation of an adaptive-repetitive visual-servo control system for a moving high-flying vehicle (HFV) with an uncalibrated camera to monitor, track, and precisely control the movements of a low-flying vehicle (LFV) or mobile ground robot. Applications of this control strategy include the use of high-flying unmanned aerial vehicles (UAVs) with computer vision for monitoring, controlling, and coordinating the movements of lower altitude agents in areas, for example, where GPS signals may be unreliable or nonexistent. When deployed, a remote operator of the HFV defines the desired trajectory for the LFV in the HFV’s camera frame.Due to the circular motion of the HFV, the resulting motion trajectory of the LFV in the image frame can be periodic in time, thus an adaptive-repetitive control system is exploited for regulation and/or trajectory tracking. The adaptive control law is able to handle uncertainties in the camera’s intrinsic and extrinsic parameters. The design and stability analysis of the closed-loop control system is presented, where Lyapunov stability is shown. Simulation and experimental results are presented to demonstrate the effectiveness of the method for controlling the movement of a low flying quadcopter, demonstrating the capabilities of the visual-servo control system for localization (i.e.,, motion capturing) and trajectory tracking control. In fact, results show that the LFV can be commanded to hover in place as well as track a user-defined flower-shaped closed trajectory, while the HFV and camera system circulates above with constant angular velocity. On average, the proposed adaptive-repetitive visual-servo control system reduces the average RMS tracking error by over 77% in the image plane and over 71% in the world frame compared to using just the adaptive visual-servo control law.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

X. He, D. Guo; K. K. Leang
Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles Proceedings Article
In: American Control Conference May 24-26, Seattle, WA, 2017, 2017.
@inproceedings{HeX_2017a,
title = {Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles},
author = {X. He, D. Guo and K. K. Leang},
year = {2017},
date = {2017-03-01},
booktitle = {American Control Conference May 24-26, Seattle, WA, 2017},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

D. Bareiss, J. Bourne, K. K. Leang
On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles Journal Article
In: Autonomous robots, vol. 41, no. 7, pp. 1539-1554, 2017.
@article{BareissD_2017a,
title = {On-Board Model-Based Automatic Collision Avoidance: Application in Remotely Piloted Unmanned Aerial Vehicles},
author = {D. Bareiss, J. Bourne, K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/BareissD_2017.pdf
http://www.kam.k.leang.com/academics/autonomous-robots-2017/},
year = {2017},
date = {2017-02-01},
journal = {Autonomous robots},
volume = {41},
number = {7},
pages = {1539-1554},
abstract = {This paper focuses on real-world implementation and verification of a local, model-based stochastic automatic collision avoidance algorithm, with application in remotely-piloted (tele-operated) unmanned aerial vehicles (UAVs). Automatic collision detection and avoidance for tele-operated UAVs can reduce the workload of pilots to allow them to focus on the task at hand, such as searching for victims in a search and rescue scenario following a natural disaster. The proposed algorithm takes the pilot's input and exploits the robot's dynamics to predict the robot's trajectory for determining whether a collision will occur. Using on-board sensing for obstacle detection, if a collision is imminent, the algorithm modifies the pilot's input to avoid the collision while attempting to maintain the pilot's intent. The algorithm is implemented using a low-cost on-board computer, fight-control system, and a two-dimensional laser illuminated detection and ranging (LIDAR) sensor for obstacle detection along the trajectory of the robot. The sensor data is processed using a split-and-merge segmentation algorithm and an approximate Minkowski difference. Results from flight tests demonstrate the algorithm's capabilities for tele-operated collision-free control of an experimental UAV. For videos related to this work, please look here: http://www.kam.k.leang.com/academics/autonomous-robots-2017/},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2016
Christopher J. Pratt
Design and modeling of the dynamic underactuated flying-walking (DUCK) robot Masters Thesis
University of Utah, 2016.
@mastersthesis{PrattCJ_2017,
title = {Design and modeling of the dynamic underactuated flying-walking (DUCK) robot},
author = {Christopher J. Pratt},
url = {http://www.kam.k.leang.com/academics/pubs/PrattCJ_MSThesis2016.pdf},
year = {2016},
date = {2016-12-31},
school = {University of Utah},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}

D. Guo, W. Yim,; K. K. Leang
Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea, pp. 4258 - 4265, 2016.
@inproceedings{DuoD_2016_IROS,
title = {Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera},
author = {D. Guo, W. Yim, and K. K. Leang},
year = {2016},
date = {2016-11-01},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea},
pages = {4258 - 4265},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Daman Bareiss, Jur van den Berg, Jake Abbott, Kam K. Leang
Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles Proceedings Article
In: 2016 IEEE International Symposium on Safety, Security and Rescue Robotics, October 23-27, 2016, EPFL, Lausanne, Switzerland, 2016.
@inproceedings{BareissD_2016c,
title = {Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles},
author = {Daman Bareiss, Jur van den Berg, Jake Abbott, Kam K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/BareissD_2016SSRR.pdf},
year = {2016},
date = {2016-08-23},
booktitle = {2016 IEEE International Symposium on Safety, Security and Rescue Robotics, October 23-27, 2016, EPFL, Lausanne, Switzerland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

D. Bareiss
University of Utah, 2016.
@phdthesis{BareissD_2016b,
title = {Model-based collision avoidance for dynamic single- and multi-robot systems: theory and application in ground and aerial robots},
author = {D. Bareiss},
url = {http://www.kam.k.leang.com/academics/pubs/2016BareissDissertation.pdf},
year = {2016},
date = {2016-06-07},
school = {University of Utah},
abstract = {This dissertation solves the collision avoidance problem for single and multi-robot systems where dynamic effects are significant. In many robotic systems (e.g., highly maneuverable and agile unmanned aerial vehicles) the dynamics cannot be ignored and collision avoidance schemes based on kinematic models can result in collisions or provide limited performance, especially at high operating speeds. Herein, real-time, model-based collision avoidance algorithms that explicitly consider the robots' dynamics and perform real-time input changes to alter the trajectory and steer the robot away from potential collisions are developed, implemented, and verified in simulations and physical experiments. Such algorithms are critical in applications where a high degree of autonomy and performance are needed, for example in robot-assisted first response where aerial and/or mobile ground robots are required to maneuver quickly through cluttered and dangerous environments in search of survivors. Firstly, the research extends reciprocal collision avoidance to robots with dynamics by unifying previous approaches to reciprocal collision avoidance under a single, generalized representation using control obstacles. In fact, it is shown how velocity obstacles, acceleration velocity obstacles, continuous control obstacles, and linear quadratic regulator (LQR)-obstacles are special instances of the generalized framework. Furthermore, an extension of control obstacles to general reciprocal collision avoidance for non-linear,
non-homogeneous systems where the robots may have different state spaces and different non-linear equations of motion from one another is described. Both simulations and physical experiments are provided for a combination of differential-drive, differential-drive with a trailer, and car-like robots to demonstrate that the approach is capable of letting a non-homogeneous group of robots with non-linear equations of motion safely avoid collisions at real-time computation rates. Secondly, the research develops a stochastic collision avoidance algorithm for a tele-operated unmanned aerial vehicle (UAV) that considers uncertainty in the robot's dynamics model and the obstacles' position as measured from sensors. The model-based automatic collision avoidance algorithm is implemented on a custom-designed quadcopter UAV system with on-board computation and the sensor data is processed using a split-and-merge segmentation algorithm and an approximate Minkowski difference. Flight tests are conducted to validate the algorithm's capabilities for providing tele-operated collision-free operation. Finally, a set of human subject studies are performed to quantitatively compare the performance between the model-based algorithm, the basic risk field algorithm (a variant on potential field), and full manual control. The results show that the model-based algorithm performs significantly better than manual control in both the number of collisions and the UAVs average speed, both of which are extremely vital, for example, for UAV-assisted search and rescue applications. Compared to the potential-field based algorithm, the model-based algorithm allowed the pilot to operate the UAV with higher average speeds.},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
non-homogeneous systems where the robots may have different state spaces and different non-linear equations of motion from one another is described. Both simulations and physical experiments are provided for a combination of differential-drive, differential-drive with a trailer, and car-like robots to demonstrate that the approach is capable of letting a non-homogeneous group of robots with non-linear equations of motion safely avoid collisions at real-time computation rates. Secondly, the research develops a stochastic collision avoidance algorithm for a tele-operated unmanned aerial vehicle (UAV) that considers uncertainty in the robot's dynamics model and the obstacles' position as measured from sensors. The model-based automatic collision avoidance algorithm is implemented on a custom-designed quadcopter UAV system with on-board computation and the sensor data is processed using a split-and-merge segmentation algorithm and an approximate Minkowski difference. Flight tests are conducted to validate the algorithm's capabilities for providing tele-operated collision-free operation. Finally, a set of human subject studies are performed to quantitatively compare the performance between the model-based algorithm, the basic risk field algorithm (a variant on potential field), and full manual control. The results show that the model-based algorithm performs significantly better than manual control in both the number of collisions and the UAVs average speed, both of which are extremely vital, for example, for UAV-assisted search and rescue applications. Compared to the potential-field based algorithm, the model-based algorithm allowed the pilot to operate the UAV with higher average speeds.

C. J. Pratt; K. K. Leang
Dynamic underactuated flying-walking (DUCK) robot Proceedings Article
In: 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3267 - 3274, 2016.
@inproceedings{PrattCJ_2016a,
title = {Dynamic underactuated flying-walking (DUCK) robot},
author = {C. J. Pratt and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/PrattCJ_2016a.pdf},
year = {2016},
date = {2016-01-15},
booktitle = {2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden},
pages = {3267 - 3274},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2015

Christopher J. Dudley, Alex Woods; Kam K. Leang
A Micro Spherical Rolling and Flying Robot Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, Hamburg, Germany, 2015.
@inproceedings{DudleyCJ_2015,
title = {A Micro Spherical Rolling and Flying Robot},
author = {Christopher J. Dudley, Alex Woods and Kam K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/DudleyCJ_2015.pdf},
year = {2015},
date = {2015-07-31},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02},
address = {Hamburg, Germany},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Daman Bareiss, Jur van den Berg; Kam K. Leang
Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, pp. 4818-4825, Hamburg, Germany, 2015.
@inproceedings{BareissDa_2015,
title = {Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles},
author = {Daman Bareiss, Jur van den Berg and Kam K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/BareissD_2015a.pdf},
year = {2015},
date = {2015-07-31},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02},
pages = {4818-4825},
address = {Hamburg, Germany},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2014
Christopher J. Dudley
A spherical aerial terrestrial robot Masters Thesis
University of Nevada, Reno, 2014.
@mastersthesis{DudleyCJ_2014,
title = {A spherical aerial terrestrial robot},
author = {Christopher J. Dudley},
url = {http://www.kam.k.leang.com/academics/pubs/DudleyCJ_2014_MSThesis.pdf},
year = {2014},
date = {2014-06-21},
school = {University of Nevada, Reno},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
2013
Brandon M. Hurd
Control of a Quadcopter Aerial Robot Using Optic Flow Sensing Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2013.
@mastersthesis{HurdBM_2013,
title = {Control of a Quadcopter Aerial Robot Using Optic Flow Sensing},
author = {Brandon M. Hurd},
url = {http://www.kam.k.leang.com/academics/pubs/HubbardJ_2011_MSThesis.pdf},
year = {2013},
date = {2013-12-21},
address = {Reno, Nevada},
school = {University of Nevada, Reno},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}

M. Walker; K. K. Leang; S. Tyler; S. Lether; P. Weisberg
Unmanned aircraft systems in environmental science: cheaper, better, faster and more accessible large scale data collection to improve understanding of natural resources Proceedings Article
In: CABNR/NAES/UNCE Main Station - Field Day, 2013.
@inproceedings{WalkerW_2013,
title = {Unmanned aircraft systems in environmental science: cheaper, better, faster and more accessible large scale data collection to improve understanding of natural resources},
author = { M. Walker and K. K. Leang and S. Tyler and S. Lether and P. Weisberg},
year = {2013},
date = {2013-01-01},
booktitle = {CABNR/NAES/UNCE Main Station - Field Day},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

N. L. Johnson; K. K. Leang
Augmented proportional-derivative control of a micro quadcopter Proceedings Article
In: ASME Dynamic Systems and Controls Conference, 2013.
@inproceedings{JohnsonNL_2013a,
title = {Augmented proportional-derivative control of a micro quadcopter},
author = { N. L. Johnson and K. K. Leang},
year = {2013},
date = {2013-01-01},
booktitle = {ASME Dynamic Systems and Controls Conference},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
