




2023

A Tutorial on Real-Time Computing Issues for Control Systems Proceedings Article
In: American Control Conference, San Diego, CA, May 31-June 2, 2023.
2022

Information-Based Mobile Sensor Network Localization and Tracking of an Uncooperative Target Proceedings Article
In: IEEE Military Communications Conference (MILCOM), November 28 - December 2, Rockville, MD, USA, pp. 490-495, 2022.
Ionic Polymer-Metal Composite Sensors and Actuators for Wearable and Medical Devices Proceedings Article
In: 6th International Conference on Active Materials and Soft Mechatronics (AMSM 2022), October 26-29, 2022, Georgia Tech, Atlanta, Georgia, USA, 2022.
Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning Proceedings Article
In: American Control Conference, June 8-11, 2022.

Surface Roughness Effects on Ionic Polymer-Metal Composite (IPMC) Sensitivity for Compression Loads Proceedings Article
In: SPIE Smart Structures + Nondestructive Evaluation, Long Beach, CA, March 6-10, 2022.
2020

Autonomous Light Assessment Drone for Dark Skies Studies Proceedings Article
In: ASME Dynamic Systems and Control Conference (Virtual conference), October 4-7, 2020, 2020.
Ionic Polymer Metal Composite Sensors with Engineered Interfaces (eIPMCs): compression sensing modeling and experiments Proceedings Article
In: 2020.

Multi-time Scale Control of Dual-Stage Nanopositioning Systems Proceedings Article
In: 21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,, 2020.
2019

Body-pose Bayesian estimation of a snow-avalanche victim: a method for first responders and/or aerial robots to quickly locate a buried victim Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
Assembly Planning using a Multi-Arm System for Polygonal Furniture Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Magneto-electroactive Endoluminal Soft Robots Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.

Gaussian-based Kernel for Multi-Agent Aerial Chemical-Plume Mapping Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019 (Accepted, forthcoming), 2019.
A New Quasi-steady In-Ground Effect Model Rotorcraft Unmanned Aerial Vehicles Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.

Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Park City, Utah, October 8-11, 2019, 2019.
Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems Proceedings Article
In: American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019, 2019.
2018

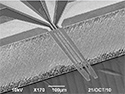
Development of a 3-DOF tripedal stick-slip microrobotic mobile platform for unconstrained, omnidirectional sample positioning Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Atlanta, GA, October 1-3, 2018.

Design, Modeling, and Analysis of Inductive Resonant Coupling Wireless Power Transfer for Micro Aerial Vehicles (MAVs) Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Brisbane Convention & Exhibition Centre, Australia, May 21-25, 2018, pp. 6104-6109, 2018.
2017
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Position and Linear Velocity Estimation for Position-Based Visual Servo Control of an Aerial Robot in GPS-Denied Environments Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Mutual Information Control for Target Acquisition: A Method to Localize a Gas/Chemical Plume Source Using a Mobile Sensor Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Modeling and Adaptive Nonlinear Disturbance Observer for Closed-Loop Control of In-Ground-Effects on Multi-rotor UAVs Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC) Tyson Corner, Virginia, USA, October 11-13, 2017, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.

Fused Filament 3D Printing of Ionic Polymer-Metal Composites for Soft Robotics Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, Portland, OR, March 26-29, 2017., 2017.
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.

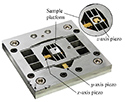
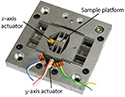
Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.

Repetitive Control Design and Implementation for Periodic Motion Tracking in Aerial Vehicles Proceedings Article
In: American Control Conference May 24-26, Seattle, WA, 2017, 2017.

3D-Printed Ionic Polymer-Metal Composite Soft Crawling Robot Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, 2017, 2017.

A Unified Leader-Follower Scheme for Mobile Robots with Uncalibrated On-board Camera Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), Sands Expo and Convention Centre, Marina Bay Sands in Singapore, May 29 - June 3, pp. 3792 - 3797, 2017.
2016

Adaptive Repetitive Visual-Servo Control of a Low-Flying Unmanned Aerial Vehicle with an Uncalibrated High-Flying Camera Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 9-14, 2016, Daejeon, Korea, pp. 4258 - 4265, 2016.

Study of Improved Pilot Performance using Automatic Collision Avoidance for Tele-operated Unmanned Aerial Vehicles Proceedings Article
In: 2016 IEEE International Symposium on Safety, Security and Rescue Robotics, October 23-27, 2016, EPFL, Lausanne, Switzerland, 2016.
3D Printing of Smart Materials Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.

IPMC Manufacturing Techniques: Recent Developments Proceedings Article
In: International Workshop on Active Materials and Soft Mechatronics, KAIST, Daejeon, South Korea, July 7-8, 2016, 2016.

High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.

Master-slave control with hysteresis inversion for dual-stage nanopositioning systems Proceedings Article
In: American Control Conference (Accepted), Boston MA, July 6-8, 2016, 2016.

Dynamic underactuated flying-walking (DUCK) robot Proceedings Article
In: 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3267 - 3274, 2016.

Characterization of 3D-printed IPMC Actuators Proceedings Article
In: SPIE Smart Structures/NDE, Las Vegas, Nevada, March 20-24, 2016, 2016.
2015

A Micro Spherical Rolling and Flying Robot Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, Hamburg, Germany, 2015.

Stochastic automatic collision avoidance for tele-operated unmanned aerial vehicles Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 28 - October 02, pp. 4818-4825, Hamburg, Germany, 2015.

Fused Filament Additive Manufacturing of Ionic Polymer-Metal Composite Soft Active 3D Structures Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), September 21-23, 2015 in Colorado Springs, Colorado., Colorado Springs, Colorado, 2015, (Jim Carrico and Nick Traeden were winners of the 2015 SMASIS Conf. Best Student Paper Award!).
Rapid fabrication of modular nanoscale tool-tips for nano and micro manufacturing Proceedings Article
In: 4M/ICOMM 2015 Conference (Accepted), 2015.
2014

Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
2013

Augmented proportional-derivative control of a micro quadcopter Proceedings Article
In: ASME Dynamic Systems and Controls Conference, 2013.

Unmanned aircraft systems in environmental science: cheaper, better, faster and more accessible large scale data collection to improve understanding of natural resources Proceedings Article
In: CABNR/NAES/UNCE Main Station - Field Day, 2013.
An experimental comparison of PI, inversion, and damping control for high performance nanopositioning Proceedings Article
In: American Control Conference, 2013.

The effects of electrode surface morphology on the actuation performance of IPMC Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2013.
Sectored tube-shaped ionic polymer-metal composite actuator with integrated sensor Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, September 19-21, Snowbird, Utah, USA, 2013.

Precision Control of Ionic Polymer-Metal Composite Actuators Proceedings Article
In: 7th World Congress on Biomimetics, Artificial Muscles and Nano-Bio (BAMN2013), 2013.
2012

Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.
Spatial-temporal control of dual-stage nanpositioners Proceedings Article
In: IEEE Control and Decision Conference, 2012.
Overcoming the speed limitations of constant-force mode AFM Proceedings Article
In: Seeing at the Nanoscale 2012, 2012.
Flexure design using metal matrix composite materials: nanopositioning example Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), 2012.

Physics based electromechanical model of IPMC considering various underlying currents Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2012.

The NSF GK-12 E-Fellowship Program: Toward Energy-Aware STEM Leaders for the 21st Century Proceedings Article
In: 2012 SMTI National Conference, 2012.
2011
A twistable artificial muscle for underwater robotic applications Proceedings Article
In: US-Korea Summit on Science and Engineering (UKC), 2011.

Electrically responsive stiffness change of IPMCs Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
Repetitive control design for piezoelectric actuators Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
Design and fabrication of an automatic nano tool-tip exchanger for scanning probe microscopy Proceedings Article
In: ASME 2011 International Manufacturing Science and Engineering Conference (MSEC2011), 2011.
Modeling and designing IPMCs for twisting motion: electromechanical and mechanoelectrical transduction Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2011.

Mitigating IPMC back-relaxation effect using multi-input control Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
Characterization of sectored-electrode IPMC-based propulsors for underwater locomotion Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), Scottsdale, Arizona, September 18–21, 2011, pp. 171–180, 2011.
2010

IPMC: recent progress in modeling, manufacturing, and new applications Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, 2010.

Sectored-electrode IPMC actuator for bending and twisting motion Proceedings Article
In: SPIE Smart Structures and Materials and Nondestructive Evaluation and Health Monitoring, pp. 764221, 2010.

Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.
A thermally-activated modular SPM probe for mulitfunctional applications Proceedings Article
In: ASME International Manufacturing Science and Engineering Conference, 2010.

Tracking control of oscillatory motion in IPMC actuators for underwater applications Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.
Dual-stage repetitive control for high-speed nanopositioning Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control, 2010.

Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.

Development of dimensionally scalable IPMC materials Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Invited session on EAP, 2010.

Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8, 2010.
High performance nanopositioning with integrated strain and force feedback Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited Session on Micro- and Nanoscale Dynamics and Control, 2010.
2009
A novel multifunctional SPM probe with modular quick-change tips for fully automated probe-based nanofabrication Proceedings Article
In: Proceedings of NSF Engineering Research and Innovation Conference, 2009.
Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning Proceedings Article
In: American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems, pp. 301 - 306, 2009.
2008
Design and fabrication of a multifunctional scanning probe with integrated tip changer for fully automated nanofabrication Proceedings Article
In: 23rd ASPE Anual Meeting and 12th ICPE, 2008.
High-speed serial-kinematic AFM scanner: design and drive considerations Proceedings Article
In: American Control Conference, Invited Session on Modeling and Control of SPM, pp. 3188 – 3193, 2008.
Energy harvesting via pyroelectric effect using PZT Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, 2008.
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs, pp. 2028 – 2033, 2008.
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.
Hysteresis inverse iterative learning control of piezoactuators in AFM Proceedings Article
In: 17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems, 2008.
Application of Feedforward Dynamics Compensation in Ionic-Polymer Metal Composite Actuators Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics Conference, pp. 69270F-1 – 69270F-12, 2008.

Modeling and control of smart actuators: integrating nano/bio technology into the ME curriculum Proceedings Article
In: ASEE Annual Conference and Exposition, 2008.
2007
A biaxial shape memory alloy actuated cell/tissue stretching system Proceedings Article
In: ASME International Mechanical Engineering Congress and Exposition (IMECE), 2007.
A collaborative approach to teach modeling and control of smart actuators in the mechanical engineering curriculum Proceedings Article
In: ASME International Mechanical Engineering Congress and Exposition, 2007.
Hysteresis compensation for high-precision positioning of a shape memory alloy actuator using integrated iterative-feedforward and feedback inputs Proceedings Article
In: American Control Conference, pp. 4246 – 4253, 2007.
2006
The design of a high-voltage charge-feedback piezo-amplifier Proceedings Article
In: Actuator 2006 Conference, pp. 353 – 355, 2006.
Hysteresis characterization using charge-feedback control for LIPCA a device Proceedings Article
In: SPIE Smart Structures and Materials and NDE for Health Monitoring and Diagnostics, 2006.

Optimal seek-trajectory design for dual-stage systems Proceedings Article
In: American Control Conference, pp. 606 – 612, 2006.
Precise positioning of a shape memory alloy actuator using iterative control Proceedings Article
In: Actuator 2006, pp. 467 – 470, 2006.
2004
Iterative learning control of piezo positioners for long-range SPM-based nanofabrication Proceedings Article
In: The 3rd IFAC Symposium on Mechatronic Systems, 2004.
2003

Iterative feedforward compensation of hysteresis in piezo positioners Proceedings Article
In: IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives, pp. 2626 - 2631, 2003.
2002
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
