What is Nanopositioning?
Nanopositioning is the science and engineering of moving and sensing the position of tools, objects, and matter at the nanometer scale. The ultimate goal is to do so with the highest precision, accuracy, and speed as possible.
One nanometer is one billionth of a meter, which is a small unit of length. How small is this? Consider the marble and Earth example. If the Earth (with a diameter of approximately 12,756 km) was scaled to 1 meter, then a normal-sized object on Earth such as a marble would be representative of 1 nanometer. Experts often argue over what constitutes as ‘nanotechnology’, but in general most would agree that it’s dealing with anything measuring between 1 and 100 nanometers (nm). Larger than that is the microscale, and smaller than that is the atomic scale.
Nanopositioning Research
Our research on nanopositioning focuses on three key areas:
- Mechanical design of high-performance nanopositioning stages (click here to see our nanopositioners),
- Control theory for enhancing the performance of nanopositioning stages, and
- Sensing technologies for measuring the motion of nanopositioning stages.
Much of our work relates to creating high-speed high-precision nanopositioning platforms for scanning probe microscopes (SPMs) and related technologies.
Publications related to nanopositioning:
2022
64.
W. S. Nagel, S. Andersson, G. Clayton; K. K. Leang
Low-Coupling Hybrid Parallel-Serial-Kinematic Nanopositioner with Nonorthogonal Flexure: Nonlinear Design and Control Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 5, pp. 3683-3693, 2022.
@article{NagelWS_2022_Tmech,
title = {Low-Coupling Hybrid Parallel-Serial-Kinematic Nanopositioner with Nonorthogonal Flexure: Nonlinear Design and Control},
author = {W. S. Nagel, S. Andersson, G. Clayton and K. K. Leang},
year = {2022},
date = {2022-10-01},
urldate = {2021-11-18},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {27},
issue = {5},
pages = {3683-3693},
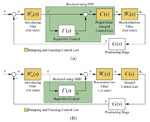
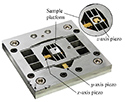
abstract = {This article focuses on the design and high-precision control of a new dual-stage, three-axis hybrid parallel-serial-kinematic nanopositioner developed specifically for feature-tracking applications with arbitrary scanning directions. Dual-actuation is achieved by integrating a three-axis shear piezoelectric actuator into the large-range planar stage. A novel nonorthogonal compliant motion-amplifying mechanism which reorients the lateral sample-platform displacement to align with the principal directions of the input piezoactuators is used to minimize parasitic (coupling) motion. A nonlinear rigid-link model and finite element analysis (FEA) are used to optimize over the orientation parameter during the design process. A prototype stage is manufactured and tested, and the lateral and vertical travel ranges are approximately 18 × 21 and 1 μ m, respectively, with secondary lateral actuation in the range of 1 × 1 μ m. Coupling in the long-range stage is below -31 dB for both axes, an estimated 51 to 86% reduction compared to a traditional perpendicular-mechanism design. The measured dominant resonances for the lateral directions of the long-range stage are approximately 1.4 kHz, while short-range positioner resonances are approximately 11 and 40 kHz for the lateral and vertical directions, respectively. The design of a new feedforward-feedback controller is described, and the controller is implemented with field-programmable gate array (FPGA) hardware, where individual actuator contributions are intuitively determined by shaping the frequency response of their relative and summed displacements. An inverse hysteresis operator is used to linearize the plant behavior for effective motion control. Experimental tracking and atomic force microscopy (AFM) imaging results are presented to demonstrate the performance of the new mechanical and control system designs.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This article focuses on the design and high-precision control of a new dual-stage, three-axis hybrid parallel-serial-kinematic nanopositioner developed specifically for feature-tracking applications with arbitrary scanning directions. Dual-actuation is achieved by integrating a three-axis shear piezoelectric actuator into the large-range planar stage. A novel nonorthogonal compliant motion-amplifying mechanism which reorients the lateral sample-platform displacement to align with the principal directions of the input piezoactuators is used to minimize parasitic (coupling) motion. A nonlinear rigid-link model and finite element analysis (FEA) are used to optimize over the orientation parameter during the design process. A prototype stage is manufactured and tested, and the lateral and vertical travel ranges are approximately 18 × 21 and 1 μ m, respectively, with secondary lateral actuation in the range of 1 × 1 μ m. Coupling in the long-range stage is below -31 dB for both axes, an estimated 51 to 86% reduction compared to a traditional perpendicular-mechanism design. The measured dominant resonances for the lateral directions of the long-range stage are approximately 1.4 kHz, while short-range positioner resonances are approximately 11 and 40 kHz for the lateral and vertical directions, respectively. The design of a new feedforward-feedback controller is described, and the controller is implemented with field-programmable gate array (FPGA) hardware, where individual actuator contributions are intuitively determined by shaping the frequency response of their relative and summed displacements. An inverse hysteresis operator is used to linearize the plant behavior for effective motion control. Experimental tracking and atomic force microscopy (AFM) imaging results are presented to demonstrate the performance of the new mechanical and control system designs.
63.
William Nagel, Aleksandra Mitrovic, Garrett Clayton, Kam K. Leang
Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning Proceedings Article
In: American Control Conference, June 8-11, 2022.
@inproceedings{NagelWS_2022_ACC,
title = {Discrete Input-Output Sliding-Mode Control with Range Compensation: Application in High-Speed Nanopositioning},
author = {William Nagel, Aleksandra Mitrovic, Garrett Clayton, Kam K. Leang
},
year = {2022},
date = {2022-06-08},
urldate = {2022-06-08},
booktitle = {American Control Conference, June 8-11},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
62.
W. S. Nagel
Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy PhD Thesis
2022.
@phdthesis{NagelW_2022_PHD,
title = {Long-Range Low-Coupling Dual-Stage Nanopositioning: Design and Control for High-Speed Atomic Force Microscopy},
author = {W. S. Nagel},
year = {2022},
date = {2022-04-18},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
2021
61.

A. Mitrovic, W. S. Nagel, K. K. Leang; G. M. Clayton
Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 26, iss. 3, pp. 1412-1421, 2021.
@article{MitrovicA_2019_TmechSpecialIssue,
title = {Closed-loop Range-Based Control of Dual-Stage Nanopositioning Systems},
author = {A. Mitrovic, W. S. Nagel, K. K. Leang and G. M. Clayton },
doi = {10.1109/TMECH.2020.3020047},
year = {2021},
date = {2021-06-01},
urldate = {2021-06-01},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {26},
issue = {3},
pages = {1412-1421},
abstract = {In this paper, a closed-loop control framework for dual-stage nanopositioning systems is presented that allows the user to allocate control efforts to the individual actuators based on their range capabilities. Recent work by the authors has focused on range-based control of dual-stage actuators implemented as a prefilter, which assumes that each individual actuator has sensor feedback enabling them to be controlled separately. This paper seeks to address the problem of range-based control of dual-stage systems when sensor measurements are only available from the total output of the system, a commonly encountered design. This is a significant departure from previous work since the range-based filter is included in the dual-stage system feedback loop and stability becomes a concern. In this work, the controller is presented, stability conditions are determined, and imaging experiments are performed on an atomic force microscope (AFM). Tracking results show that the root-mean-square (RMS) tracking error for various triangular reference trajectories is improved with the presented range-based control structure by up to 50% compared to frequency-based methods.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
In this paper, a closed-loop control framework for dual-stage nanopositioning systems is presented that allows the user to allocate control efforts to the individual actuators based on their range capabilities. Recent work by the authors has focused on range-based control of dual-stage actuators implemented as a prefilter, which assumes that each individual actuator has sensor feedback enabling them to be controlled separately. This paper seeks to address the problem of range-based control of dual-stage systems when sensor measurements are only available from the total output of the system, a commonly encountered design. This is a significant departure from previous work since the range-based filter is included in the dual-stage system feedback loop and stability becomes a concern. In this work, the controller is presented, stability conditions are determined, and imaging experiments are performed on an atomic force microscope (AFM). Tracking results show that the root-mean-square (RMS) tracking error for various triangular reference trajectories is improved with the presented range-based control structure by up to 50% compared to frequency-based methods.
2020
60.
A. Mitrovic, K. K. Leang; G. M. Clayton
Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners Journal Article
In: Mechatronics, Vol. 69, pp. 102371, 2020, 2020.
@article{MitrovicA_2019_Mechatronics,
title = {Analysis and Experimental Comparison of Range-based Control for Dual-Stage Nanopositioners},
author = {A. Mitrovic, K. K. Leang and G. M. Clayton },
doi = {https://doi.org/10.1016/j.mechatronics.2020.102371},
year = {2020},
date = {2020-04-27},
journal = {Mechatronics, Vol. 69, pp. 102371, 2020},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
59.
D. Guo, B. Nagel, G. M. Clayton; K. K. Leang
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems with Application in AFM Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 25, no. 2, pp. 558 - 569, 2020.
@article{GuoD_2020_Tmech,
title = {Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems with Application in AFM},
author = {D. Guo, B. Nagel, G. M. Clayton and K. K. Leang},
doi = {10.1109/TMECH.2020.2971755},
year = {2020},
date = {2020-02-25},
journal = {IEEE/ASME Trans. on Mechatronics},
volume = {25},
number = {2},
pages = {558 - 569},
abstract = {This article focuses on trajectory redesign for dual-stage nanopositioning systems, where speed, range, and resolution are considered. Dual-stage nanopositioning systems are becoming increasingly popular due to their unique ability to achieve long-range and high-speed operation. Conventional trajectory assignment methods for dual-stage systems commonly consider frequency characteristics of the actuators, a process that can inappropriately allocate short-range, low-frequency components of a reference signal. A new systematic range-and-temporal-based trajectory-redesign process is presented, where the desired trajectory is first split based on achievable positioning bandwidth, and then, split spatially based on the achievable range and positioning resolution. Inversion-based feedforward control techniques are then used to compensate for the dynamic and hysteretic behaviors of a piezo-based prototype dual-stage positioner; this control architecture is selected to emphasize improvements achieved through the new trajectory-redesign method, as well as allow for implementation onto platforms with minimal sensing capabilities. Simulations and atomic force microscope experiments are included to demonstrate the success of this redesign procedure compared to approaches that consider frequency or range alone.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This article focuses on trajectory redesign for dual-stage nanopositioning systems, where speed, range, and resolution are considered. Dual-stage nanopositioning systems are becoming increasingly popular due to their unique ability to achieve long-range and high-speed operation. Conventional trajectory assignment methods for dual-stage systems commonly consider frequency characteristics of the actuators, a process that can inappropriately allocate short-range, low-frequency components of a reference signal. A new systematic range-and-temporal-based trajectory-redesign process is presented, where the desired trajectory is first split based on achievable positioning bandwidth, and then, split spatially based on the achievable range and positioning resolution. Inversion-based feedforward control techniques are then used to compensate for the dynamic and hysteretic behaviors of a piezo-based prototype dual-stage positioner; this control architecture is selected to emphasize improvements achieved through the new trajectory-redesign method, as well as allow for implementation onto platforms with minimal sensing capabilities. Simulations and atomic force microscope experiments are included to demonstrate the success of this redesign procedure compared to approaches that consider frequency or range alone.
58.
W. S. Nagel; K. K. Leang
Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure Conference
American Control Conference (Accepted, forthcoming), 2020.
@conference{NagelW_2020_ACC,
title = {Improved Linear Quadratic Tracking Control of Dual-Stage Nanopositioning Systems through a Cascading Structure},
author = {W. S. Nagel and K. K. Leang},
year = {2020},
date = {2020-01-15},
booktitle = {American Control Conference (Accepted, forthcoming)},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
57.
A. Mitrovic, M. Milanovic, K. K. Leang; G. M. Clayton
Multi-time Scale Control of Dual-Stage Nanopositioning Systems Proceedings Article
In: 21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,, 2020.
@inproceedings{MitrovicA_2020_IFAC,
title = {Multi-time Scale Control of Dual-Stage Nanopositioning Systems},
author = {A. Mitrovic, M. Milanovic, K. K. Leang and G. M. Clayton},
year = {2020},
date = {2020-01-01},
booktitle = {21st World Congress of the International Federation of Automatic Control (Under review), Berlin, Germany, July 12-17,},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2019
56.
W. S. Nagel; K. K. Leang
Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems Proceedings Article
In: American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019, 2019.
@inproceedings{NagelW_2019_ACC,
title = {Robust Sliding-Mode Control for Dual-Stage Nanopositioning Systems},
author = {W. S. Nagel and K. K. Leang},
year = {2019},
date = {2019-01-31},
booktitle = {American Control Conference (Accepted, forthcoming), Invited session: Precision Mechatronics, Philadelphia, PA, July 10-12, 2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2018
55.
I. Adibnazari, W. S. Nagel; K. K. Leang
A 3D-Printed 3-DOF Tripedal Microrobotic Platform for Unconstrained and Omnidirectional Sample Positioning Journal Article
In: International Journal of Intelligent Robotics and Applications, vol. 2, no. 4, pp. 425-435, 2018.
@article{AdibnazariI_2018_IJIRA,
title = {A 3D-Printed 3-DOF Tripedal Microrobotic Platform for Unconstrained and Omnidirectional Sample Positioning},
author = {I. Adibnazari, W. S. Nagel and K. K. Leang},
year = {2018},
date = {2018-11-06},
journal = {International Journal of Intelligent Robotics and Applications},
volume = {2},
number = {4},
pages = {425-435},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2017
54.
A. Mitrovic, K. K. Leang; G. M. Clayton
Spatial filter design for dual-stage systems Proceedings Article
In: ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia, 2017.
@inproceedings{Mitrovica_2017_DSCC,
title = {Spatial filter design for dual-stage systems},
author = {A. Mitrovic, K. K. Leang and G. M. Clayton},
year = {2017},
date = {2017-05-16},
booktitle = {ASME Dynamic Systems and Control Conference (DSCC), Tysons Corner, Virginia, USA, October 11-13, 2107 at the Sheraton Tysons Hotel in Tysons Corner, Virginia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
53.
W. Nagel; K. K. Leang
Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
@inproceedings{NagelW_2017c,
title = {Design of a Dual-Stage, Three-Axis Hybrid Parallel-Serial-Kinematic Nanopositioner with Mechanically Mitigated Cross-Coupling},
author = {W. Nagel and K. K. Leang},
year = {2017},
date = {2017-03-02},
booktitle = {Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
52.
D. Guo, A. Mitrovi, G. M. Clayton; K. K. Leang
Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems Proceedings Article
In: Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017, 2017.
@inproceedings{GuoD_2017d,
title = {Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems},
author = {D. Guo, A. Mitrovi, G. M. Clayton and K. K. Leang},
year = {2017},
date = {2017-03-02},
booktitle = {Invited session on Design & Control of Micro/Nano Precision Mechatronic Systems, IEEE Int. Conf. on Advanced Intelligent Mechatronics, Munich, Germany, July 3-7, 2017},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2016
51.
T. T. Ashley, T. Huang, S. B. Andersson, W. Nagel; K. K. Leang
High-speed AFM through non-raster scanning and high speed actuation Proceedings Article
In: Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation., 2016.
@inproceedings{AshleyTT_2016,
title = {High-speed AFM through non-raster scanning and high speed actuation},
author = {T. T. Ashley, T. Huang, S. B. Andersson, W. Nagel and K. K. Leang},
year = {2016},
date = {2016-03-02},
booktitle = {Biophysical Society Annual Meeting, Los Angeles, CA, February 27 - March 2. Poster presentation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
50.
W. S. Nagel, G. M. Clayton; K. K. Leang
Master-slave control with hysteresis inversion for dual-stage nanopositioning systems Proceedings Article
In: American Control Conference (Accepted), Boston MA, July 6-8, 2016, 2016.
@inproceedings{NagelWS_2016a,
title = {Master-slave control with hysteresis inversion for dual-stage nanopositioning systems},
author = {W. S. Nagel, G. M. Clayton and K. K. Leang},
year = {2016},
date = {2016-01-28},
booktitle = {American Control Conference (Accepted), Boston MA, July 6-8, 2016},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
49.
Y. Yong,; K. K. Leang
Design of high-speed nanopositioning systems, Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Springer, 2016.
@inbook{YongY_2016a,
title = {Design of high-speed nanopositioning systems, Fundamentals and Applications of Nanopositioning Technologies},
author = {Y. Yong, and K. K. Leang},
editor = {C. Ru and X. Liu and Y. Sun},
year = {2016},
date = {2016-01-01},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
48.
A. J. Fleming; K. K. Leang
Position sensors, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: X. Liu C. Ru,; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies (Under review), Springer, 2016.
@inbook{FlemingAJ_2016a,
title = {Position sensors, in Fundamentals and Applications of Nanopositioning Technologies},
author = {A. J. Fleming and K. K. Leang},
editor = {C. Ru, X. Liu, and Y. Sun},
year = {2016},
date = {2016-01-01},
booktitle = {Fundamentals and Applications of Nanopositioning Technologies (Under review)},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
47.
K. K. Leang; A. J. Fleming
Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies Book Chapter
In: Ru, C.; Liu, X.; Sun, Y. (Ed.): Fundamentals and Applications of Nanopositioning Technologies, Springer, 2016.
@inbook{Leangkk_2016a,
title = {Tracking control for nanopositioning systems, in Fundamentals and Applications of Nanopositioning Technologies},
author = {K. K. Leang and A. J. Fleming},
editor = {C. Ru and X. Liu and Y. Sun},
year = {2016},
date = {2016-01-01},
booktitle = {Fundamentals and Applications of Nanopositioning Technologies},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
2015
46.
A. J. Fleming, Y. R. Teo; K. K. Leang
Low-order damping and tracking control for scanning probe systems Journal Article
In: Mechatronics, Frontiers in Mechanical Engineering, vol. 1, pp. Article 14, 2015.
@article{FlemingAJ_2015a,
title = {Low-order damping and tracking control for scanning probe systems},
author = {A. J. Fleming, Y. R. Teo and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/FlemingAJ_2015a.pdf},
doi = {10.3389/fmech.2015.00014},
year = {2015},
date = {2015-10-24},
journal = {Mechatronics, Frontiers in Mechanical Engineering},
volume = {1},
pages = {Article 14},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
45.
A. A. Eielsen; J. T. Gravdahla; K. K. Leang
Low-order Continuous-time Robust Repetitive Control: Application in Nanopositioning Journal Article
In: Mechatronics, vol. 30, pp. 231–243, 2015.
@article{EielsenAA_2015,
title = {Low-order Continuous-time Robust Repetitive Control: Application in Nanopositioning},
author = { A. A. Eielsen and J. T. Gravdahla and K. K. Leang},
year = {2015},
date = {2015-09-01},
journal = {Mechatronics},
volume = {30},
pages = {231–243},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2014
44.
A. J. Fleming; K. K. Leang
Design, modeling, and control of nanopositioning systems Book
Springer, New York, 2014, ISBN: 3319066161.
@book{FlemingAJ_2013d,
title = {Design, modeling, and control of nanopositioning systems},
author = { A. J. Fleming and K. K. Leang},
url = {http://www.amazon.com/Modeling-Control-Nanopositioning-Advances-Industrial/dp/3319066161},
isbn = {3319066161},
year = {2014},
date = {2014-06-03},
publisher = {Springer},
address = {New York},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
43.
G. C. Clayton; C. J. Dudley; K. K. Leang
Range-based control of dual-stage nanopositioning systems Journal Article
In: Review of Scientific Instruments, vol. 85, no. 4, pp. 045003 (6 pages), 2014.
@article{ClaytonGC_2014a,
title = {Range-based control of dual-stage nanopositioning systems},
author = { G. C. Clayton and C. J. Dudley and K. K. Leang},
url = {http://kam.k.leang.com/academics/pubs/ClaytonGM_2014a.pdf},
year = {2014},
date = {2014-04-01},
journal = {Review of Scientific Instruments},
volume = {85},
number = {4},
pages = {045003 (6 pages)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
42.
A. A. Eielsen; J. T. Gravdahl; K. K. Leang
Analog robust repetitive control for nanopositioning Proceedings Article
In: 19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming), 2014.
@inproceedings{EielsenAA_2014a,
title = {Analog robust repetitive control for nanopositioning},
author = { A. A. Eielsen and J. T. Gravdahl and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/EielsenAA_2014.pdf},
year = {2014},
date = {2014-01-01},
booktitle = {19th World Congress of the International Federation of Automatic Control, 24-29 August 2014, Cape Town, South Africa (Forthcoming)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2013
41.
A. J. Fleming; K. K. Leang
An experimental comparison of PI, inversion, and damping control for high performance nanopositioning Proceedings Article
In: American Control Conference, 2013.
@inproceedings{FlemingAJ_2013b,
title = {An experimental comparison of PI, inversion, and damping control for high performance nanopositioning},
author = { A. J. Fleming and K. K. Leang},
url = {http://www.precisionmechatronicslab.com/wp-content/publications/C13b.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {American Control Conference},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
40.
Y. Shan; K. K. Leang
Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication Journal Article
In: IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems, vol. 33, no. 6, pp. 86 – 105, 2013.
@article{ShanY_2013a,
title = {Mechanical design and control for high-speed nanopositioning: serial-kinematic nanopositioners and repetitive control for nanofabrication},
author = { Y. Shan and K. K. Leang},
url = {http://kam.k.leang.com/academics/pubs/ShanY_2013a.pdf},
year = {2013},
date = {2013-01-01},
journal = {IEEE Control Systems Magazine (In press), Special Issue on Dynamics and Control of Micro and Naoscale Systems},
volume = {33},
number = {6},
pages = {86 -- 105},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2012
39.
A. A. Eielsen; J. T. Gravdahl; K. K. Leang
Robust damping PI repetitive control for nanopositioning Proceedings Article
In: American Control Conference, 2012.
@inproceedings{EielsenAA_2012a,
title = {Robust damping PI repetitive control for nanopositioning},
author = { A. A. Eielsen and J. T. Gravdahl and K. K. Leang},
year = {2012},
date = {2012-06-27},
booktitle = {American Control Conference},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
38.
A. J. Fleming; K. K. Leang
Overcoming the speed limitations of constant-force mode AFM Proceedings Article
In: Seeing at the Nanoscale 2012, 2012.
@inproceedings{FlemingAJ_2012a,
title = {Overcoming the speed limitations of constant-force mode AFM},
author = { A. J. Fleming and K. K. Leang},
year = {2012},
date = {2012-01-01},
booktitle = {Seeing at the Nanoscale 2012},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
37.
Y. Shan; K. K. Leang
Accounting for hysteresis in repetitive control design: nanopositioning example Journal Article
In: Automatica, vol. 48, no. 8, pp. 1751 – 1758, 2012.
@article{ShanY_2012b,
title = {Accounting for hysteresis in repetitive control design: nanopositioning example},
author = { Y. Shan and K. K. Leang},
url = {http://kam.k.leang.com/academics/pubs/ShanY_2012b.pdf},
year = {2012},
date = {2012-01-01},
journal = {Automatica},
volume = {48},
number = {8},
pages = {1751 -- 1758},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
36.
K. K. Leang
An experiment for teaching students about control at the nanoscale Journal Article
In: IEEE Cont. Syst. Mag., vol. 32, no. 1, pp. 66–68, 2012.
@article{LeangKK_2012a,
title = {An experiment for teaching students about control at the nanoscale},
author = { K. K. Leang},
year = {2012},
date = {2012-01-01},
journal = {IEEE Cont. Syst. Mag.},
volume = {32},
number = {1},
pages = {66--68},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
35.
B. J. Kenton; K. K. Leang
Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner Journal Article
In: IEEE/ASME Trans. Mechatronics, vol. 17, no. 2, pp. 356 – 369, 2012.
@article{KentonBJ_2012,
title = {Design and control of a three-axis serial-kinematic high-bandwidth nanopositioner},
author = { B. J. Kenton and K. K. Leang},
url = {http://kam.k.leang.com/academics/pubs/KentonBJ_2012a.pdf},
year = {2012},
date = {2012-01-01},
journal = {IEEE/ASME Trans. Mechatronics},
volume = {17},
number = {2},
pages = {356 -- 369},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
34.
Y. Shan; K. K. Leang
Dual-stage repetitive control with Prandtl-Ishlinskii hysteresis inversion for piezo-based nanopositioning Journal Article
In: Mechatronics, vol. 22, pp. 271 – 281, 2012.
@article{ShanY_2012a,
title = {Dual-stage repetitive control with Prandtl-Ishlinskii hysteresis inversion for piezo-based nanopositioning},
author = { Y. Shan and K. K. Leang},
url = {http://kam.k.leang.com/academics/pubs/ShanY_2012a.pdf},
year = {2012},
date = {2012-01-01},
journal = {Mechatronics},
volume = {22},
pages = {271 -- 281},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
33.
B. J. Kenton; K. K. Leang
Flexure design using metal matrix composite materials: nanopositioning example Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA), 2012.
@inproceedings{KentonBJ_2012b,
title = {Flexure design using metal matrix composite materials: nanopositioning example},
author = { B. J. Kenton and K. K. Leang},
year = {2012},
date = {2012-01-01},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
32.
Y. Yong; S. O. R. Moheimani; B. J. Kenton; K. K. Leang
Invited Review: High-speed flexure-guided nanopositioning: mechanical design and control Issues Journal Article
In: Review of Scientific Instruments, vol. 83, no. 12, pp. 121101, 2012.
@article{YongY_2012,
title = {Invited Review: High-speed flexure-guided nanopositioning: mechanical design and control Issues},
author = { Y. Yong and S. O. R. Moheimani and B. J. Kenton and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/YongYK_2012.pdf},
year = {2012},
date = {2012-01-01},
journal = {Review of Scientific Instruments},
volume = {83},
number = {12},
pages = {121101},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
31.
G. M. Clayton; K. K. Leang
Spatial-temporal control of dual-stage nanpositioners Proceedings Article
In: IEEE Control and Decision Conference, 2012.
@inproceedings{ClaytonGM_2012a,
title = {Spatial-temporal control of dual-stage nanpositioners},
author = { G. M. Clayton and K. K. Leang},
year = {2012},
date = {2012-01-01},
booktitle = {IEEE Control and Decision Conference},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2011
30.
Yingfeng Shan
Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners PhD Thesis
Univesity of Nevada, Reno, 2011.
@phdthesis{ShanY_2011b,
title = {Repetitive control for hysteretic systems: theory and application in piezo-based nanopositioners},
author = {Yingfeng Shan},
url = {http://www.kam.k.leang.com/academics/pubs/ShanY_2011_Dissertation.pdf},
year = {2011},
date = {2011-12-17},
address = {Reno, Nevada 89557-0312},
school = {Univesity of Nevada, Reno},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
29.
B. J. Kenton; A. J. Fleming; K. K. Leang
A compact ultra-fast vertical nanopositioner for improving SPM scan speed Journal Article
In: Rev. Sci. Instr., vol. 82, pp. 123703, 2011.
@article{KentonBJ_2011b,
title = {A compact ultra-fast vertical nanopositioner for improving SPM scan speed},
author = { B. J. Kenton and A. J. Fleming and K. K. Leang},
year = {2011},
date = {2011-01-01},
journal = {Rev. Sci. Instr.},
volume = {82},
pages = {123703},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
28.
Y. Shan; K. K. Leang
Repetitive control design for piezoelectric actuators Proceedings Article
In: ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), 2011.
@inproceedings{ShanY_2011a,
title = {Repetitive control design for piezoelectric actuators},
author = { Y. Shan and K. K. Leang},
year = {2011},
date = {2011-01-01},
booktitle = {ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
27.
Seth C. Ashley
Application of an Inverse-Hysteresis Iterative Control Algorithm for AFM Fabrication Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2010.
@mastersthesis{AshleySC_2010,
title = {Application of an Inverse-Hysteresis Iterative Control Algorithm for AFM Fabrication},
author = {Seth C. Ashley},
url = {http://www.kam.k.leang.com/academics/pubs/AshleySC_2010_MSThesis.pdf},
year = {2010},
date = {2010-10-23},
address = {Reno, Nevada},
school = {University of Nevada, Reno},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
26.
Brian J. Kenton
Design, characterization, and control of a high-bandwidth serial-kinematic nanopositioning stage for scanning probe microscopy applications Masters Thesis
University of Nevada, Reno, Reno, Nevada, 2010.
@mastersthesis{KentonBJ_2010b,
title = {Design, characterization, and control of a high-bandwidth serial-kinematic nanopositioning stage for scanning probe microscopy applications},
author = {Brian J. Kenton},
url = {http://www.kam.k.leang.com/academics/pubs/BJKentonThesis2010.pdf},
year = {2010},
date = {2010-08-28},
address = {Reno, Nevada},
school = {University of Nevada, Reno},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
25.
A. J. Fleming; B. J. Kenton; K. K. Leang
Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4975 – 4980, 2010.
@inproceedings{FlemingAJ_2010a,
title = {Ultra-fast dual-stage vertical positioning for high performance SPMs},
author = { A. J. Fleming and B. J. Kenton and K. K. Leang},
year = {2010},
date = {2010-01-01},
booktitle = {American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems},
pages = {4975 -- 4980},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
24.
A. J. Fleming; B. J. Kenton; K. K. Leang
Bridging the gap between conventional and video-speed scanning probe microscopes Journal Article
In: Ultramicroscopy, vol. 110, no. 9, pp. 1205 – 1214, 2010.
@article{FlemingAJ_2010e,
title = {Bridging the gap between conventional and video-speed scanning probe microscopes},
author = { A. J. Fleming and B. J. Kenton and K. K. Leang},
year = {2010},
date = {2010-01-01},
journal = {Ultramicroscopy},
volume = {110},
number = {9},
pages = {1205 -- 1214},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
23.
B. J. Kenton; K. K. Leang
Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage Proceedings Article
In: American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems, pp. 4949 – 4956, 2010.
@inproceedings{KentonBJ_2010a,
title = {Design, characterization, and control of a monolithic three-axis high-bandwidth nanopositioning stage},
author = { B. J. Kenton and K. K. Leang},
year = {2010},
date = {2010-01-01},
booktitle = {American Control Conference, Special Invited Session on Advances in Actuation for Nanopositioning and Scanning Probe Systems},
pages = {4949 -- 4956},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
22.
Y. Shan; K. K. Leang
Dual-stage repetitive control for high-speed nanopositioning Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control, 2010.
@inproceedings{ShanY_2010a,
title = {Dual-stage repetitive control for high-speed nanopositioning},
author = { Y. Shan and K. K. Leang},
year = {2010},
date = {2010-01-01},
booktitle = {IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited session on Micro- and Nanoscale Dynamics and Control},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
21.
A. J. Fleming; K. K. Leang
High performance nanopositioning with integrated strain and force feedback Proceedings Article
In: IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited Session on Micro- and Nanoscale Dynamics and Control, 2010.
@inproceedings{FlemingAJ_2010c,
title = {High performance nanopositioning with integrated strain and force feedback},
author = { A. J. Fleming and K. K. Leang},
year = {2010},
date = {2010-01-01},
booktitle = {IFAC Symposium on Mechatronic Systems and ASME Dynamic Systems and Control Conference (DSCC), Invited Session on Micro- and Nanoscale Dynamics and Control},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
20.
A. J. Fleming; K. K. Leang
Integrated strain and force feedback for high performance control of piezoelectric actuators Journal Article
In: Sensors and Actuators: A. Physical, vol. 161, no. 1-2, pp. 256 – 265, 2010.
@article{FlemingAJ_2010b,
title = {Integrated strain and force feedback for high performance control of piezoelectric actuators},
author = { A. J. Fleming and K. K. Leang},
year = {2010},
date = {2010-01-01},
journal = {Sensors and Actuators: A. Physical},
volume = {161},
number = {1-2},
pages = {256 -- 265},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
19.
A. J. Fleming; K. K. Leang
Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes Proceedings Article
In: IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8, 2010.
@inproceedings{FlemingAJ_2010f,
title = {Measurement and control for high-speed sub-atomic positioning in scanning probe microscopes},
author = { A. J. Fleming and K. K. Leang},
year = {2010},
date = {2010-01-01},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA2010), Invited workshop, May 3-8},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2009
18.
G. M. Clayton; S. Tien; K. K. Leang; Q. Zou; S. Devasia
A review of feedforward control approaches in nanopositioning for high speed SPM Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, no. 6, pp. 061101 (19 pages), 2009.
@article{ClaytonGM_2009,
title = {A review of feedforward control approaches in nanopositioning for high speed SPM},
author = { G. M. Clayton and S. Tien and K. K. Leang and Q. Zou and S. Devasia},
year = {2009},
date = {2009-01-01},
journal = {ASME J. Dyn. Syst. Meas. and Cont.},
volume = {131},
number = {6},
pages = {061101 (19 pages)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
17.
Y. Shan; K. K. Leang
Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning Proceedings Article
In: American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems, pp. 301 - 306, 2009.
@inproceedings{ShanY_2009a,
title = {Repetitive control with Prandtl-Ishlinskii hysteresis inverse for piezo-based nanopositioning},
author = { Y. Shan and K. K. Leang},
year = {2009},
date = {2009-01-01},
booktitle = {American Control Conference, Invited Session on Advances in Control of Nanopositioning and SPM Systems},
pages = {301 - 306},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
16.
U. Aridogan; Y. Shan; K. K. Leang
Design and analysis of discrete-time repetitive control for scanning probe microscopes Journal Article
In: ASME J. Dyn. Syst. Meas. and Cont., vol. 131, pp. 061103 (12 pages), 2009.
@article{AridoganU_2009,
title = {Design and analysis of discrete-time repetitive control for scanning probe microscopes},
author = { U. Aridogan and Y. Shan and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/AridoganU_2009.pdf},
year = {2009},
date = {2009-01-01},
journal = {ASME J. Dyn. Syst. Meas. and Cont.},
volume = {131},
pages = {061103 (12 pages)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
15.
K. K. Leang; Q. Zou; S. Devasia
Feedforward control of piezoactuators in atomic force microscope systems: inversion-based compensation for dynamics and hysteresis Journal Article
In: IEEE Cont. Syst. Mag., Special Issue on Hysteresis, vol. 29, no. 1, pp. 70 – 82, 2009.
@article{LeangKK_2009b,
title = {Feedforward control of piezoactuators in atomic force microscope systems: inversion-based compensation for dynamics and hysteresis},
author = { K. K. Leang and Q. Zou and S. Devasia},
year = {2009},
date = {2009-01-01},
journal = {IEEE Cont. Syst. Mag., Special Issue on Hysteresis},
volume = {29},
number = {1},
pages = {70 -- 82},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
14.
K. K. Leang; A. J. Fleming
High-speed serial-kinematic AFM scanner: design and drive considerations Journal Article
In: Asian Journal of Control, Special issue on Advanced Control Methods for Scanning Probe Microscopy Research and Techniques, vol. 11, no. 2, pp. 144 – 153, 2009.
@article{LeangKK_2009d,
title = {High-speed serial-kinematic AFM scanner: design and drive considerations},
author = { K. K. Leang and A. J. Fleming},
year = {2009},
date = {2009-01-01},
journal = {Asian Journal of Control, Special issue on Advanced Control Methods for Scanning Probe Microscopy Research and Techniques},
volume = {11},
number = {2},
pages = {144 -- 153},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2008
13.
Y. Shan; J. E. Speich; K. K. Leang
Low-cost noncontact infrared sensors for sub-micro-level position measurement and control Journal Article
In: IEEE/ASME Trans. on Mechatronics, vol. 13, no. 6, pp. 700 – 709, 2008.
@article{ShanY_2008b,
title = {Low-cost noncontact infrared sensors for sub-micro-level position measurement and control},
author = { Y. Shan and J. E. Speich and K. K. Leang},
year = {2008},
date = {2008-01-01},
journal = {IEEE/ASME Trans. on Mechatronics},
volume = {13},
number = {6},
pages = {700 -- 709},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
12.
S. C. Ashley; U. Aridogan; R. O. Riddle; K. K. Leang
Hysteresis inverse iterative learning control of piezoactuators in AFM Proceedings Article
In: 17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems, 2008.
@inproceedings{AshleySC_2008,
title = {Hysteresis inverse iterative learning control of piezoactuators in AFM},
author = { S. C. Ashley and U. Aridogan and R. O. Riddle and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/AshleySC_2008.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {17th IFAC World Congress, Invited Session on Dynamics and Control of Micro- and Nanoscale Systems},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
11.
K. K. Leang; A. J. Fleming
High-speed serial-kinematic AFM scanner: design and drive considerations Proceedings Article
In: American Control Conference, Invited Session on Modeling and Control of SPM, pp. 3188 – 3193, 2008.
@inproceedings{LeangKK_2008c,
title = {High-speed serial-kinematic AFM scanner: design and drive considerations},
author = { K. K. Leang and A. J. Fleming},
year = {2008},
date = {2008-01-01},
booktitle = {American Control Conference, Invited Session on Modeling and Control of SPM},
pages = {3188 -- 3193},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
10.
A. J. Fleming; K. K. Leang
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs, pp. 2028 – 2033, 2008.
@inproceedings{FlemingAJ_2008,
title = {Evaluation of charge drives for scanning probe microscope positioning stages},
author = { A. J. Fleming and K. K. Leang},
year = {2008},
date = {2008-01-01},
booktitle = {American Control Conference, Invited session on Advanced Mechanism Design, Modeling, and Control of SPMs},
pages = {2028 -- 2033},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
9.
U. Aridogan; Y. Shan; K. K. Leang
Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes Proceedings Article
In: ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators, pp. 1325 – 1332, 2008.
@inproceedings{AridoganU_2008,
title = {Discrete-time phase compensated repetitive control for piezoactuators in scanning probe microscopes},
author = { U. Aridogan and Y. Shan and K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/AridoganU_2008.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {ASME Dynamic Systems and Control Conference, Invited Session on Dynamics Modeling and Control of Smart Actuators},
volume = {DSCC2008-2283},
pages = {1325 -- 1332},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
8.
A. J. Fleming; K. K. Leang
Charge drives for scanning probe microscope positioning stages Journal Article
In: Ultramicroscopy, vol. 108, pp. 1551–1557, 2008.
@article{FlemingAJ_2008b,
title = {Charge drives for scanning probe microscope positioning stages},
author = { A. J. Fleming and K. K. Leang},
year = {2008},
date = {2008-01-01},
journal = {Ultramicroscopy},
volume = {108},
pages = {1551--1557},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2007
7.

K. K. Leang; S. Devasia
Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators Journal Article
In: IEEE Trans. Cont. Syst. Tech., vol. 15, no. 5, pp. 927 – 935, 2007.
@article{LeangKK_2007,
title = {Feedback-linearized inverse feedforward for creep, hysteresis, and vibration compensation in AFM piezoactuators},
author = {K. K. Leang and S. Devasia},
url = {http://www.kam.k.leang.com/academics/pubs/LeangKK_2007.pdf},
year = {2007},
date = {2007-01-01},
journal = {IEEE Trans. Cont. Syst. Tech.},
volume = {15},
number = {5},
pages = {927 -- 935},
abstract = {In this brief, we study the design of a feedback and feedforward controller to compensate for creep, hysteresis, and vibration effects in an experimental piezoactuator system. First, we linearize the nonlinear dynamics of the piezoactuator by accounting for the hysteresis (as well as creep) using high-gain feedback control. Next, we model the linear vibrational dynamics and then invert the model to find a feedforward input to account vibration -- this process is significantly easier than considering the complete nonlinear dynamics (which combines hysteresis and vibration effects). Afterwards, the feedforward input is augmented to the feedback-linearized system to achieve high-precision high-speed positioning. We apply the method to a piezoscanner used in an experimental atomic force microscope to demonstrate the method’s effectiveness and we show significant reduction of both the maximum and root-mean-square tracking error. For example, high-gain feedback control compensates for hysteresis and creep effects, and in our case, it reduces the maximum error (compared to the uncompensated case) by over 90%. Then, at relatively high scan rates, the performance of the feedback controlled system can be improved by over 75% (i.e., reduction of maximum error) when the inversion-based feedforward input is integrated with the high-gain feedback controlled system.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
In this brief, we study the design of a feedback and feedforward controller to compensate for creep, hysteresis, and vibration effects in an experimental piezoactuator system. First, we linearize the nonlinear dynamics of the piezoactuator by accounting for the hysteresis (as well as creep) using high-gain feedback control. Next, we model the linear vibrational dynamics and then invert the model to find a feedforward input to account vibration -- this process is significantly easier than considering the complete nonlinear dynamics (which combines hysteresis and vibration effects). Afterwards, the feedforward input is augmented to the feedback-linearized system to achieve high-precision high-speed positioning. We apply the method to a piezoscanner used in an experimental atomic force microscope to demonstrate the method’s effectiveness and we show significant reduction of both the maximum and root-mean-square tracking error. For example, high-gain feedback control compensates for hysteresis and creep effects, and in our case, it reduces the maximum error (compared to the uncompensated case) by over 90%. Then, at relatively high scan rates, the performance of the feedback controlled system can be improved by over 75% (i.e., reduction of maximum error) when the inversion-based feedforward input is integrated with the high-gain feedback controlled system.
2006
6.
K. K. Leang; S. Devasia
Design of hysteresis-compensating iterative learning control for piezo positioners: application to atomic force microscopes Journal Article
In: Mechatronics, vol. 16, no. 3--4, pp. 141 – 158, 2006.
@article{LeangKK_2006,
title = {Design of hysteresis-compensating iterative learning control for piezo positioners: application to atomic force microscopes},
author = { K. K. Leang and S. Devasia},
year = {2006},
date = {2006-01-01},
journal = {Mechatronics},
volume = {16},
number = {3--4},
pages = {141 -- 158},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2004
5.
K. K. Leang
Iterative learning control of hysteresis in piezo-based nanopositioners: theory and application in atomic force microscopes PhD Thesis
University of Washington, 2004.
@phdthesis{LeangKK_2004b,
title = {Iterative learning control of hysteresis in piezo-based nanopositioners: theory and application in atomic force microscopes},
author = {K. K. Leang},
url = {http://www.kam.k.leang.com/academics/pubs/KamKLeangPhDDec2004.pdf},
year = {2004},
date = {2004-01-01},
address = {Seattle, WA},
school = {University of Washington},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
4.
Q. Zou; K. K. Leang; E. Sadoun; M. J. Reed; S. Devasia
Control issues in high-speed AFM for biological applications: collagen imaging example Journal Article
In: Asian Journal of Control, Special issue on Advances in Nanotechnology Control, vol. 6, no. 2, pp. 164-178, 2004.
@article{ZouQ_2004,
title = {Control issues in high-speed AFM for biological applications: collagen imaging example},
author = { Q. Zou and K. K. Leang and E. Sadoun and M. J. Reed and S. Devasia},
year = {2004},
date = {2004-01-01},
journal = {Asian Journal of Control, Special issue on Advances in Nanotechnology Control},
volume = {6},
number = {2},
pages = {164-178},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
3.
K. K. Leang; S. Devasia
Iterative learning control of piezo positioners for long-range SPM-based nanofabrication Proceedings Article
In: The 3rd IFAC Symposium on Mechatronic Systems, 2004.
@inproceedings{LeangKK_2004a,
title = {Iterative learning control of piezo positioners for long-range SPM-based nanofabrication},
author = { K. K. Leang and S. Devasia},
year = {2004},
date = {2004-01-01},
booktitle = {The 3rd IFAC Symposium on Mechatronic Systems},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2003
2.
K. K. Leang; S. Devasia
Iterative feedforward compensation of hysteresis in piezo positioners Proceedings Article
In: IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives, pp. 2626 - 2631, 2003.
@inproceedings{LeangKK_2003,
title = {Iterative feedforward compensation of hysteresis in piezo positioners},
author = { K. K. Leang and S. Devasia},
year = {2003},
date = {2003-01-01},
booktitle = {IEEE 42nd Conference on Decision and Controls, Invited session on Nanotechnology: Control Needs and Related Perspectives},
pages = {2626 - 2631},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2002
1.
K. K. Leang; S. Devasia
Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control Proceedings Article
In: The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures, pp. 283-289, 2002.
@inproceedings{LeangKK_2002,
title = {Hysteresis, creep, and vibration compensation for piezoactuators: feedback and feedforward control},
author = { K. K. Leang and S. Devasia},
year = {2002},
date = {2002-01-01},
booktitle = {The 2nd IFAC Conference on Mechatronic Systems, Invited session on Smart Materials and Structures},
pages = {283-289},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}